
















































































































































































































































































- EOL

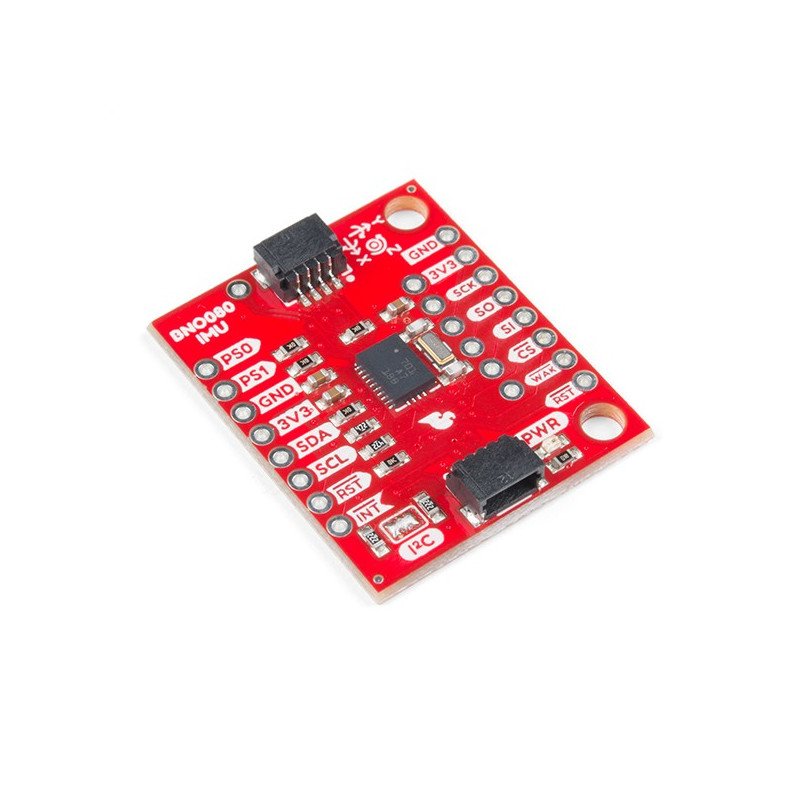





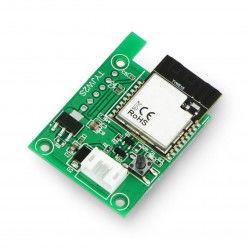
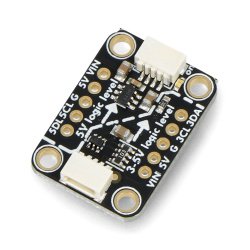
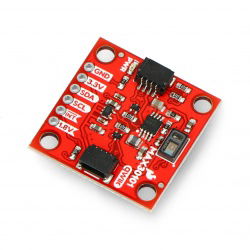
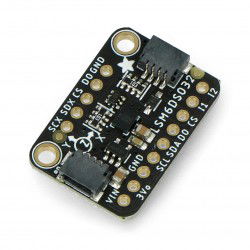
Der Sensor ist eine Kombination aus einem 3-Achsen-Digitalgyroskop , einem Beschleunigungsmesser und einem Kompass . Damit können Sie Beschleunigung, Magnetfeld und Winkelgeschwindigkeit in konfigurierbaren Bereichen messen. Es kommuniziert über den I2C -Bus, es wird mit einer Spannung von 3,3 V versorgt. Es ist für VR-Anwendungen ausgelegt. Es hat einen QWIIC-Anschluss. Es arbeitet mit einer Spannung von 1,65 V bis 3,6 V.
|
Warnung! Der Verkauf des Produkts ist abgeschlossen. Schauen Sie sich andere an diese Kategorie. |
Der Sensor ist eine Kombination aus einem 3-Achsen- Digitalgyroskop , einem Beschleunigungsmesser und einem Kompass. Es ermöglicht Ihnen, Beschleunigung , Magnetfeld und Winkelgeschwindigkeit in konfigurierbaren Bereichen zu messen. Es kommuniziert über den I2C -Bus, es wird mit einer Spannung von 3,3 V versorgt. Es ist für VR-Anwendungen ausgelegt. Es hat einen QWIIC-Anschluss. Es arbeitet mit einer Spannung von 1,65 V bis 3,6 V.
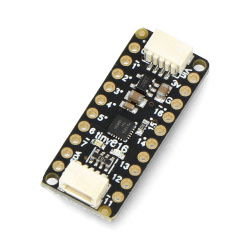
Die I2C-Schnittstelle wird für die Kommunikation mit der Zentraleinheit über den QWIIC-Anschluss oder die Goldpin-Pins verwendet . Der Sensor kann auch über SPI und UART kommunizieren.
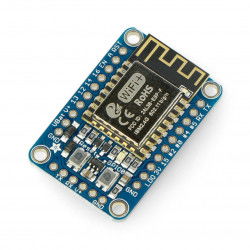
Das Produkt ist mit Arduino kompatibel Um die Arbeit mit dem Modul zu erleichtern, hat der Hersteller eine Bedienungsanleitung und eine Bibliothek für Arduino vorbereitet. |

Da die maximale Spannung, mit der das System arbeitet, 3,3 V beträgt, ist ein Spannungswandler notwendig, um mit Arduino zu arbeiten. Ausnahmen bilden Module, die mit Spannungen von 3,3 V betrieben werden, zB Arduino Pro Mini 328 - 3,3 V / 8 MHz .
Der Sensor hat Anschlüsse zur Montage von Goldpin-Steckern - 2,54 mm Raster (nicht im Lieferumfang enthalten, muss separat erworben und selbst gelötet werden).
| Stift | Beschreibung |
|---|---|
| PS0 | Wahl des Kommunikationsprotokolls. Standard 0 (I2C). |
| PS1 | Wahl des Kommunikationsprotokolls. Standard 0 (I2C). |
| Masse | Die Masse des Systems. |
| 3V3 | Versorgungsspannung von 1,65 V bis 3,6 V. |
| SDA | Die Datenleitung des I2C-Busses. |
| SCL | Die Taktleitung des I2C-Busses. |
| RST | System-Reset aktiviert mit Low-Zustand. |
| INT | Unterbrechungssignal aktiviert niedriger Zustand. |
| SCK | Taktsignal der SPI-Übertragung. |
| SO | MISO der SPI-Übertragung. |
| SI | MOSI der SPI-Übertragung. Änderung der I2C-Übertragungsadresse. |
| CS | Chip-Select der SPI-Übertragung. |
| WAK | Aufwecken des Systems aus dem Schlafmodus. Aktiviert durch den niedrigen Zustand. |
Nützliche Links |
| PAKETBREITE | 5.5 cm |
| PAKETHÖHE | 0.25 cm |
| PAKETTIEFE | 9 cm |
| PAKETGEWICHT | 0.003 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!








