Inhaltsverzeichnis:
Traditionelle mechanische Gyroskope waren vor der Einführung elektronischer Technologien in der Luftfahrt und Navigation weit verbreitet. Diese mechanischen Geräte nutzten die physikalischen Eigenschaften eines rotierenden Körpers, um eine konstante Ausrichtung im Raum zu erhalten. Heute kommt uns die kleine und große Elektronik zu Hilfe.
Elektronisches Gyroskop - was ist das?
Das Gyroskop ist auch als Inertialmessgerät (engl. IMU – Inertial Measurement Unit) bekannt. Es ist ein elektronisches Gerät zur Messung der Winkelgeschwindigkeit (Rotationsbewegung) und der Winkelbeschleunigung (Änderung der Winkelgeschwindigkeit) eines Objekts im Raum. Das Funktionsprinzip beruht auf der Ausnutzung des Coriolis-Effekts. Beispiel: An einem Waschbecken mit einem Abfluss kann man beobachten, wie sich das Wasser um den Abfluss herum verhält. Diese Bewegung wird durch die Rotation der Erde verursacht. Auf der Nordhalbkugel „zirkuliert“ das Wasser im Uhrzeigersinn, auf der Südhalbkugel in die andere Richtung, was genau auf den Coriolis-Effekt zurückzuführen ist.
Es gibt viele Klassen von Gyroskopen, abhängig vom physikalischen Funktionsprinzip und der verwendeten Technologie. Gyroskope können allein verwendet werden oder Teil komplexerer Systeme sein, wie die bereits erwähnten Trägheitsmessgeräte, Kreiselkompasse, Navigationssysteme oder Kursreferenzsysteme. Heute interessieren wir uns besonders für MEMS-Gyroskope (mikroelektromechanische Systeme). MEMS-Gyroskope (Microelectromechanical Systems) sind eine Art von Trägheitssensoren, die mikroelektronische und mikromechanische Technologien verwenden, um die Winkelgeschwindigkeit der Drehung eines Objekts zu messen. Kleine Strukturen aus Siliziumdioxid oder anderen Materialien, die in der Mikroelektromechanik verwendet werden, werden in Rotation versetzt. Eine Änderung der Drehrichtung führt dann zu Corioliskräften, die gemessen und in Winkelgeschwindigkeitsinformationen umgewandelt werden.
Entwurf des elektronischen MEMS-Gyroskops
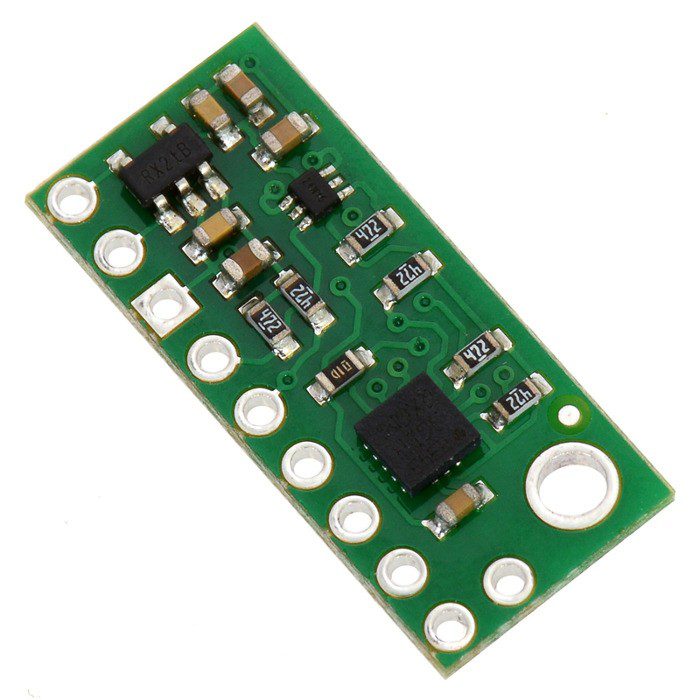
Der typische Aufbau von MEMS-Gyroskopen umfasst mikroelektronische MEMS-Sensoren, die mikroskalige mechanische Strukturen, elektronische Schaltungen zur Signalmessung und -verarbeitung sowie Steuerschaltungen enthalten. Diese Komponenten sind auf einem einzigen Chip integriert, wodurch sie klein, leicht und energieeffizient sind. Die zentrale Komponente ist ein empfindlicher Sensor. Andere Sensoren sind häufig kapazitive Sensoren, die Änderungen der elektrischen Kapazität zwischen mikroskopischen Elementen als Reaktion auf Bewegungen nutzen, und piezoelektrische Sensoren, die das Phänomen der Piezoelektrizität zur Erzeugung von Signalen als Reaktion auf mechanische Spannungen nutzen. Die eingebettete Elektronik kann die resultierenden Signale verstärken, filtern und analysieren, um genaue Winkelgeschwindigkeitsmessungen zu erhalten. Die resultierenden Daten werden von Steuerschaltungen verarbeitet, die es dem Benutzer ermöglichen, das Verhalten des Gyroskops zu steuern. Dazu gehören Kalibrierung, Rauschkompensation und Ausgangsverarbeitung.
Gyroskop und Beschleunigungsmesser im paar
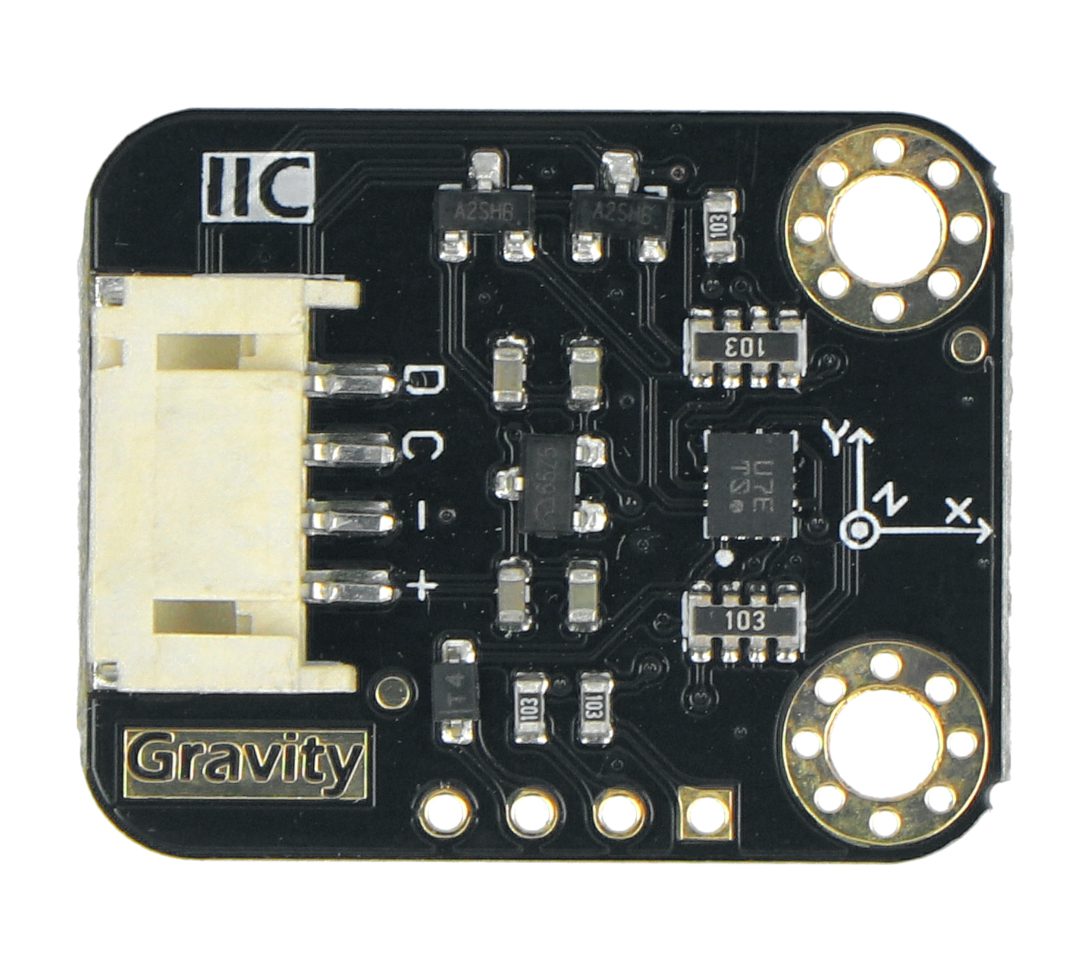
Warum tauchen Gyroskop und Beschleunigungsmesser so oft gemeinsam in elektronischen Modulen und zahlreichen so genannten Elektronik-Ökosystemen auf, zum Beispiel DFRobot Gravity? Die Antwort liegt im 3D-Raum – oder, wenn man es vorzieht, im 4D-Raum, denn auch dieser Aspekt wird in dieser Erklärung ansatzweise vorkommen. Gyroskope messen die Winkelgeschwindigkeit der Orientierungsänderung eines Objekts, während Beschleunigungsmesser die lineare Beschleunigung messen, d. h. die Änderung der Geschwindigkeit eines Objekts in einer linearen Richtung. Kombiniert man diese beiden Sensortypen, kann man vollständige Informationen über die Bewegung eines Objekts im dreidimensionalen Raum erhalten. Gyroskope können auch anfällig für eine Drift sein, d. h. eine gewisse allmähliche Veränderung des Messwerts der Winkelgeschwindigkeit im Laufe der Zeit, während Beschleunigungsmesser anfällig für Rauschen und Störungen sein können. Durch die gleichzeitige Verwendung beider Sensoren können diese Fehler kompensiert und stabilere und genauere Messungen erzielt werden.
In vielen Anwendungen wie der Bildstabilisierung in Kameras, Bewegungssteuerungen in Videospielen oder Fahrzeugsteuerungssystemen werden Gyroskope und Beschleunigungsmesser zur Stabilisierung oder Korrektur eingesetzt. Gyroskope helfen bei der Erkennung von Orientierungsänderungen, während Beschleunigungsmesser bei der Erkennung linearer Beschleunigungen helfen. Von einer sinnvollen Bewegungsverfolgung und Positionsbestimmung eines Objekts ohne Bezug auf externe Signale, d. h. von Trägheitsnavigationssystemen, kann ebenfalls kaum die Rede sein, wobei auch hier die Kombination von Daten aus beiden Sensortypen zum Einsatz kommt.
Elektronische Projekte - MEMS-Gyroskope
MEMS-Gyroskope werden gerne in verschiedenen DIY-Elektronikprojekten verwendet – sowohl in einfachen als auch in fortgeschrittenen. Sie können ein MEMS-Gyroskop in einem Bildstabilisierungsprojekt für Video- oder Fotokameras verwenden. Dank des Gyroskops ist es möglich, Verwacklungen oder Bewegungen der Kamera zu erkennen, so dass die entsprechenden Korrekturen vorgenommen werden können, was zu gleichmäßigen, stabilen Aufnahmen oder Fotos führt. Da das Gyroskop in der Luftfahrt gut bekannt ist, können MEMS-Modelle in Projekten zum Bau einer eigenen Drohne oder zur Steuerung des Flugs einer Drohne verwendet werden. Sie werden dann verwendet, um die Position zu stabilisieren und auf Änderungen der Richtung und Ausrichtung zu reagieren. Interessante Anwendungen liegen im wachsenden Bereich der virtuellen Realität (VR) und ihrer Derivate, wo schließlich etwas für die Verfolgung der Bewegung des Kopfes des Benutzers verantwortlich sein muss und eine immer realistischere Erfahrung der Interaktion mit der virtuellen Umgebung ermöglicht.
Wahl des elektronischen Gyroskops
Das erste Problem ist der Messbereich des Gyroskops, d.h. die maximale Winkelgeschwindigkeit, die es genau messen kann. Die Messgenauigkeit ist ein Schlüsselfaktor, insbesondere bei Anwendungen, die eine präzise Verfolgung erfordern. Vergewissern Sie sich, dass das Gyroskop eine ausreichende Genauigkeit für Ihre Anforderungen bietet. Das Gyroskop sollte außerdem so schnell wie möglich Messungen erzeugen, insbesondere bei Anwendungen wie der Flugsteuerung von Drohnen. Für zahlreiche batteriebetriebene Geräte ist es wichtig, dass das Modul einen geringen Stromverbrauch hat und so die Betriebszeit des Geräts mit einer einzigen Ladung verlängert. Bei aufwändigeren Projekten und solchen, die von Grund auf neu erstellt werden, und insbesondere bei Mikrocontrollern, ist die Kommunikationsschnittstelle ein zentrales Thema. Dazu gehören UART, SPI, I2C und sogar analoge Schnittstellen.
Wie hilfreich war dieser Beitrag?
Klicke auf die Sterne um zu bewerten!
Durchschnittliche Bewertung 4.1 / 5. Stimmenzahl: 7
Bisher keine Bewertungen! Sei der Erste, der diesen Beitrag bewertet.





