


























































































































































































































































































Kamera mit Time-of-Flight -Technologie, ausgestattet mit einem MIPI-CSI2-Anschluss und einer Messreichweite von bis zu 4 Metern mit einer Genauigkeit von 2 cm. Die Auflösung der Kamera beträgt 240 x 180 px , ihr Betrachtungswinkel 70° und die Bildaktualisierungsrate 120 fps . Das Modul wurde für die Arbeit mit Raspberry Pi und Nvidia Jetson Minicomputern entwickelt und optimiert. Dank der ToF-Kamera ist es möglich, die Entfernung zu Objekten zu messen und auf einfache Weise dreidimensionale Bilder zu erstellen. Es kann sowohl im Innen- als auch im Außenbereich arbeiten, ohne dass eine zusätzliche Beleuchtung erforderlich ist.
Der Hersteller hat eine ausführliche Bedienungsanleitung für die Time of Flight Kamera vorbereitet, schaut mal rein!

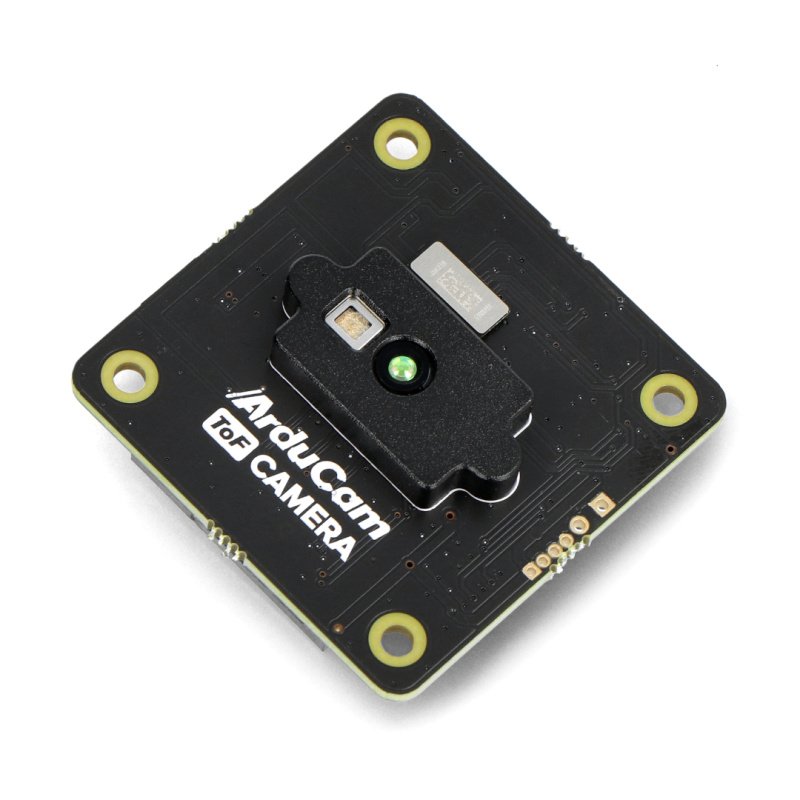
Flugzeitkamera für Raspberry Pi - Arducam B0410.

Kamera für Raspberry Pi.
Die ToF-Kamera von Arducam ist ein leistungsstarkes Computer-Vision-Tool, das dank eines vom Hersteller vorbereiteten speziellen Pakets für jede Version des Raspberry Pi-Minicomputers entwickelt und optimiert wurde. Das mit Raspberry Pi 4 / Compute Module 4 arbeitende Kameramodul ermöglicht eine Aktualisierung mit einer Geschwindigkeit von 30 fps (der Sensor selbst hat eine maximale Aktualisierungsrate von 120 fps).
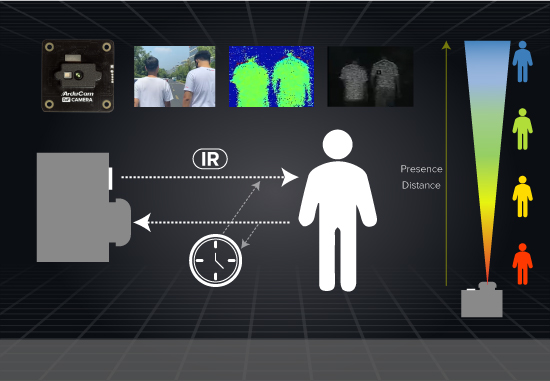
Die ToF- oder Time-of-Flight-Kamera sendet moduliertes Licht aus (CW-Methode) und verwendet die Zeit, die das emittierte Licht benötigt, um zurückzureflektieren, um die Entfernungs-/Tiefeninformationen eines Objekts/einer beliebigen Szene und die Tiefendaten (X-, Y-Koordinatenposition) zu erhalten , Z) in jedem Pixel. Der Lichtweg errechnet sich aus der Formel d=C/2f, wobei C die Lichtgeschwindigkeit und f die Modulationsfrequenz ist.
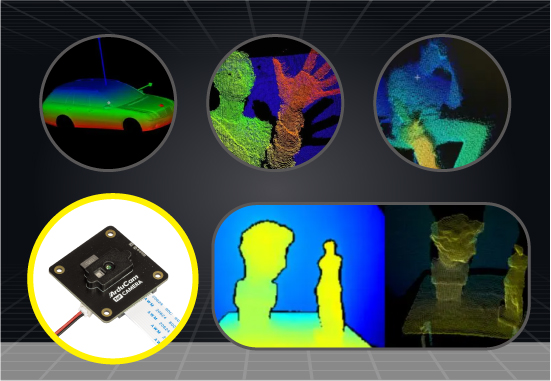
Mit der Time-of-Flight-Kamera mit dem Raspberry Pi ist es möglich, 3D-Bilder und photogrammetrische Anwendungen zu kartieren, zu erstellen, die Punkte erfordern, die aus 3D-Tiefendaten generiert werden, die von der ToF-Kamera erfasst wurden. Sie können leicht in einem Raspberry Pi-basierten System mit geringem Stromverbrauch erreicht werden.
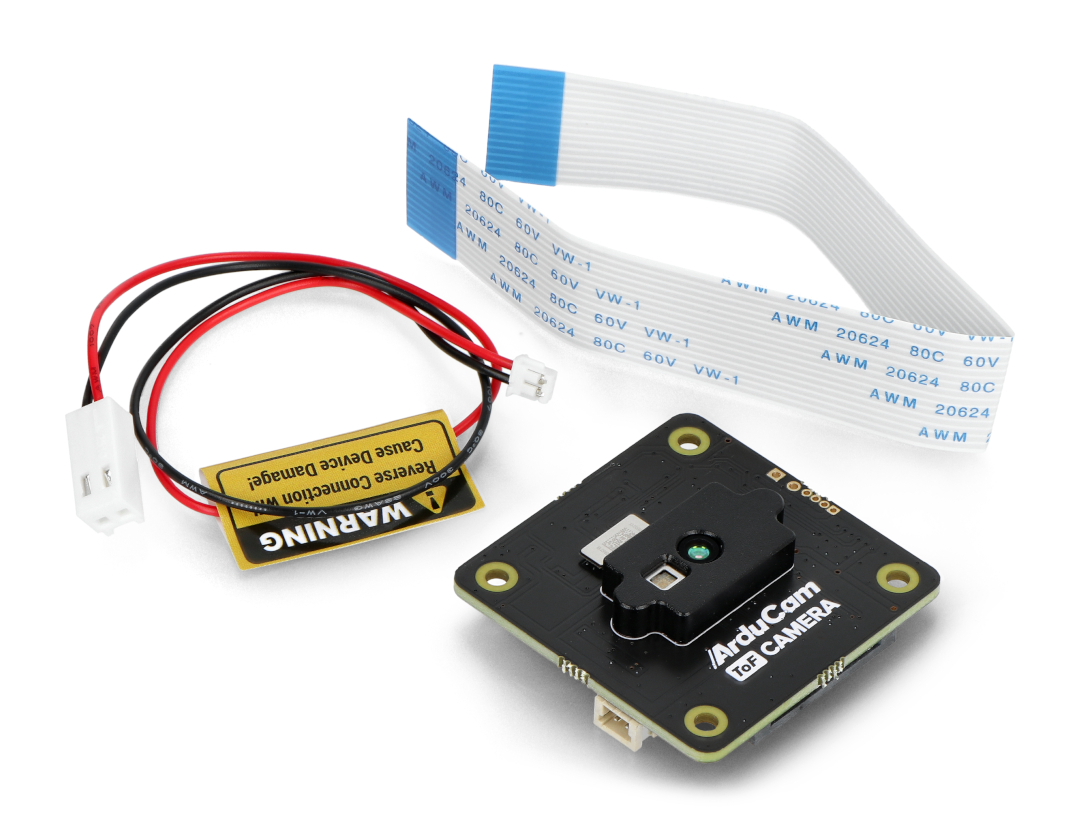 Der Inhalt des ToF-Kamerakits für Raspberry Pi.
Der Inhalt des ToF-Kamerakits für Raspberry Pi.
| Niebezpieczne | Komponente |
| PAKETBREITE | 6 cm |
| PAKETHÖHE | 5 cm |
| PAKETTIEFE | 1.5 cm |
| PAKETGEWICHT | 0.017 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!

Produktinformation
Das Produkt ist eine Komponente, die für die weitere Montage/den Prototypenbau bestimmt ist. Es stellt kein eigenständiges fertiges Produkt im Sinne der Vorschriften über die Produktsicherheit dar.
Dane GPSR
Herkunftsland: China
Hersteller-Kontaktdaten: Nanjing Paichi Electronics Technology co.,LTD RM#507, BLD#32, No.8 West Xianlin Shanhu Qixia District, Nanjing, China, 210046
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]


