



























































































































































































































































































120: 1 Getriebemotor, 160 U/min, Drehmoment 0,8 kg * cm (0,07 Nm). Die Geräte verfügen über einen Quadratur-Encoder mit einer Auflösung von 16 Impulsen pro Umdrehung (nach Wandlung 1920 Impulse pro Umdrehung). Der Motor kann von einem Arduino-Mikrocontroller gesteuert werden.
Mikro-Getriebemotor 120:1, 160 U/min, Drehmoment 0,8 kg * cm (0,07 Nm). Die Geräte verfügen über einen Quadratur-Encoder mit einer Auflösung von 16 Impulsen pro Umdrehung (nach Wandlung 1920 Impulse pro Umdrehung). Der Motor ist ideal für den Einsatz in mobilen Robotern.
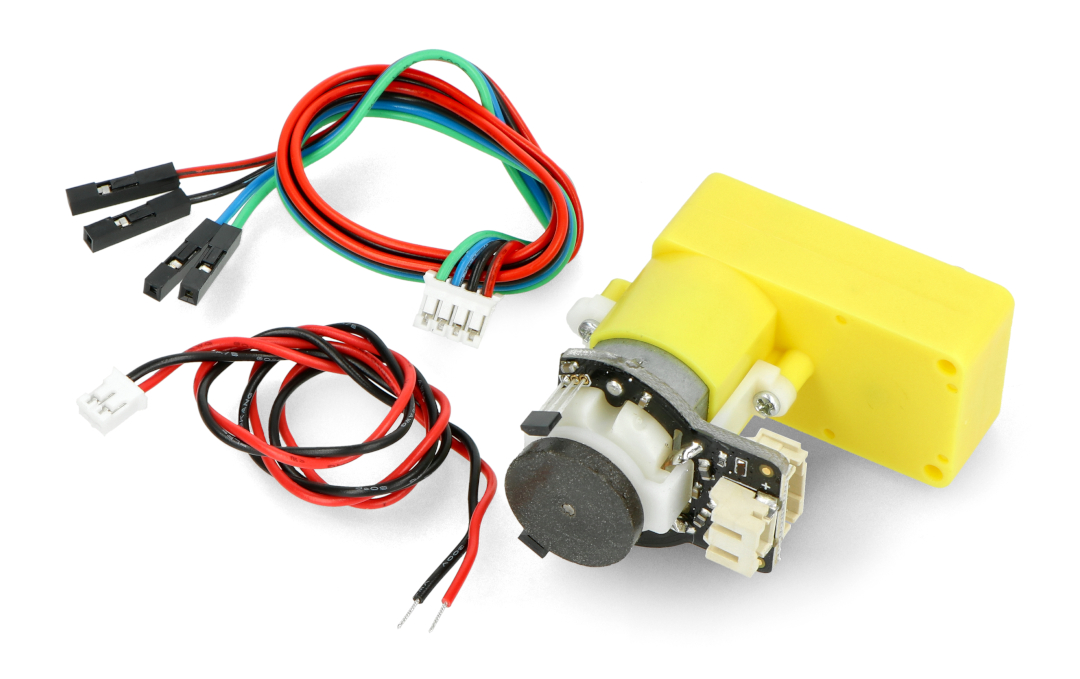
Dem Modul liegt ein Anschlusskabel mit Buchsenklemmen bei.
Das Produkt ist mit Arduino kompatibel Der Hersteller hat eine Bedienungsanleitung mit einem Beispielprogramm für Arduino vorbereitet. |
Das Motormodul hat 6 Pins, im Set ist ein Kabel mit Buchsen im Raster 2,54 mm enthalten.

Verteilung von Motorklemmen.
| Nein | Name | Beschreibung |
|---|---|---|
| 1 | Motorstromversorgung Pluspol + | Die Spannung reicht von 3 V bis 7,5 V. |
| 2 | Motorstromversorgung Minuspol - | Motorgewicht. |
| 3 | Encoder-Signalausgang A | Rechteckiges Frequenzsignal A - zur Drehzahlmessung. |
| 4 | Encoder-Signalausgang B | Rechteckiges Signal der Frequenz B - zur Drehzahlmessung. |
| 5 | Gebergewicht | Gebergewicht. |
| 6 | Encoder-Stromversorgung | Die Spannung reicht von 4,5 V bis 7,5 V. |
Das Funktionsprinzip von Encodern
Parameter für Leerlaufbetrieb mit 6-V-Versorgung
Drehzahl: 160 U/min
Strom: 0,17 A.
Geschwindigkeit: 60 U/min
Strom: 0,14 A.
Nützliche Links |
| Stromspannung aus | 3,0 V |
| Stromspannung Nieder | 7,5 V. |
| Motor - Stromverbrauch | 170mA |
| Motor - Getriebe | 120: 1 |
| Drehgeschwindigkeit | 160 U/min |
| Drehmoment | 0,8 kg * cm |
| Masse | 50 g |
| Motor - durchschn. Welle | 5,4mm |
| Niebezpieczne | Komponente |
| PAKETBREITE | 7 cm |
| PAKETHÖHE | 3.6 cm |
| PAKETTIEFE | 10 cm |
| PAKETGEWICHT | 0.048 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!

Produktinformation
Das Produkt ist eine Komponente, die für die weitere Montage/den Prototypenbau bestimmt ist. Es stellt kein eigenständiges fertiges Produkt im Sinne der Vorschriften über die Produktsicherheit dar.
Dane GPSR
Herkunftsland: China
Hersteller-Kontaktdaten: Zhiwei Robotics Corp. Unit 01, 26/F, A1 Shanghai T & I Tower, No. 1699 Zhongke Road, Pudong District, Shanghai, P.R.China [email protected]
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]



