












































































































































































































































































































- EOL








|
Warnung! Der Verkauf des Produkts ist abgeschlossen. Schauen Sie sich andere an diese Kategorie. |
DerUGV02 ist ein fortschrittliches mobiles Gelände-Roboter-Chassis von Waveshare, das über 6 feste Räder mit 4-Rad-Antrieb verfügt und sich hervorragend für die Bewältigung schwieriger Hindernisse im Gelände eignet. Der Roboter ist mit Gummireifen ausgestattet, damit die gesamte Struktur schwereren Lasten besser standhalten kann und beim Fahren besser gedämpft wird. Er ist mit den Minicomputern Raspberry Pi und Jetson Nano kompatibel, die über einen seriellen UART- oder I2C-Port an das Fahrzeug angeschlossen werden können, um seine Funktionen in Bezug auf Steuerung, Sensor- und Kameradatenverarbeitung usw. zu erweitern. Das Chassis enthält eine fortschrittliche Steuerplatine mit einem eingebetteten ESP32-Chip, der unter anderem WiFi- und Bluetooth-Kommunikation ermöglicht und die Servos mit PWM (Pulse Width Modulation) steuert.
Der Hersteller hat ein Benutzerhandbuch erstellt, um Ihnen den Einstieg in das Produkt zu erleichtern.
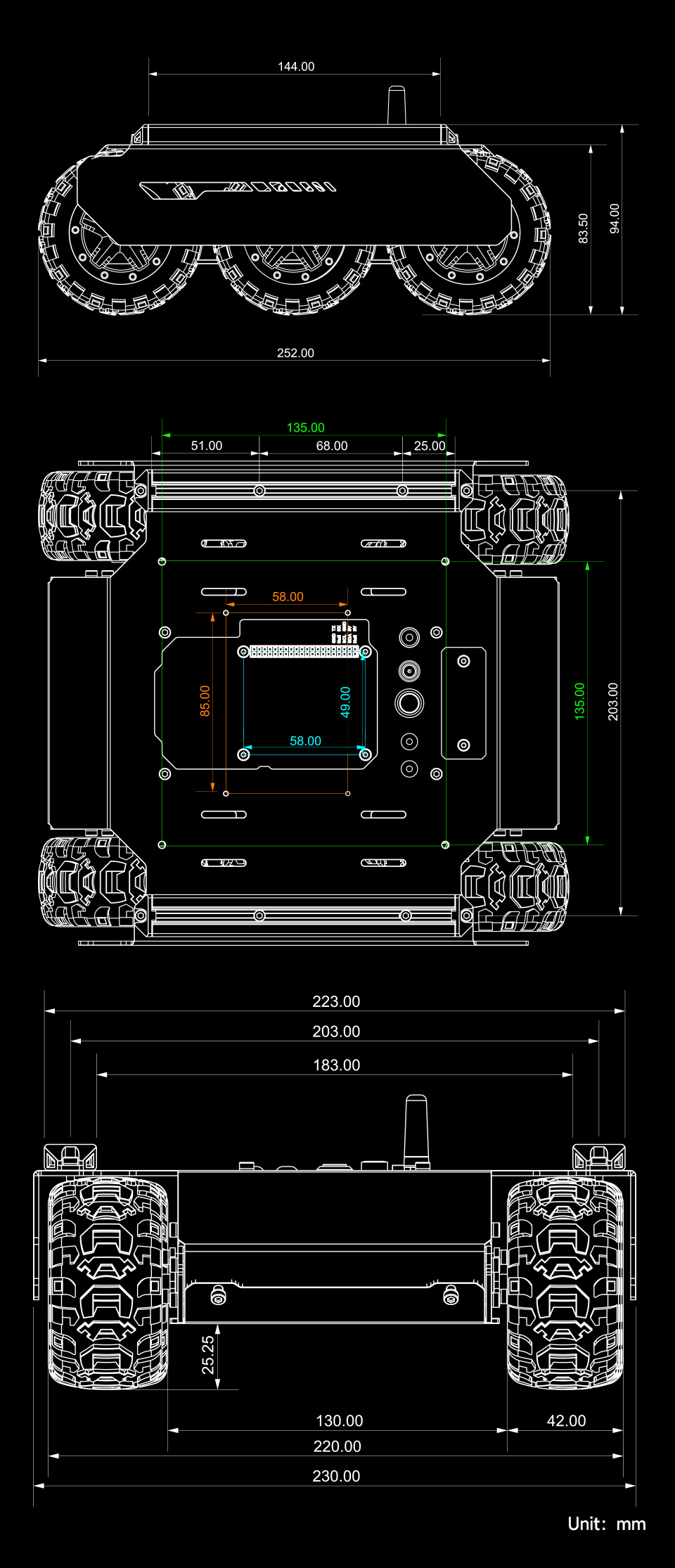
 UGV02 - 6-Rad-Roboterchassis mit Antrieb und ESP32-Steuerung - Waveshare 25077.
UGV02 - 6-Rad-Roboterchassis mit Antrieb und ESP32-Steuerung - Waveshare 25077.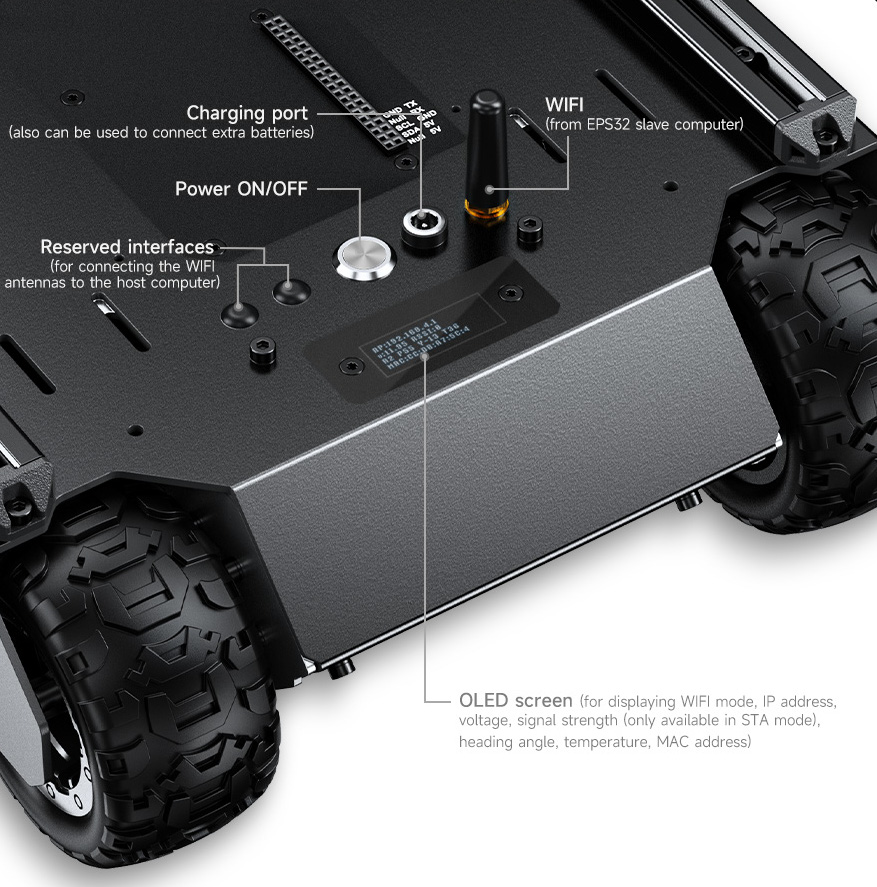
Das UGV02-Roboterchassis ermöglicht die Interaktion mit dem Gerät über Befehle des beliebten JSON-Datenaustauschformats, das die Steuerung der Bewegung, Geschwindigkeit und Richtung des Roboters ermöglicht und die Abfolge seiner Aufgaben automatisiert. Der Roboter kann Befehle sowohl aus der Ferne über eine Webanwendung als auch über eine direkte UART-Kommunikation entgegennehmen.
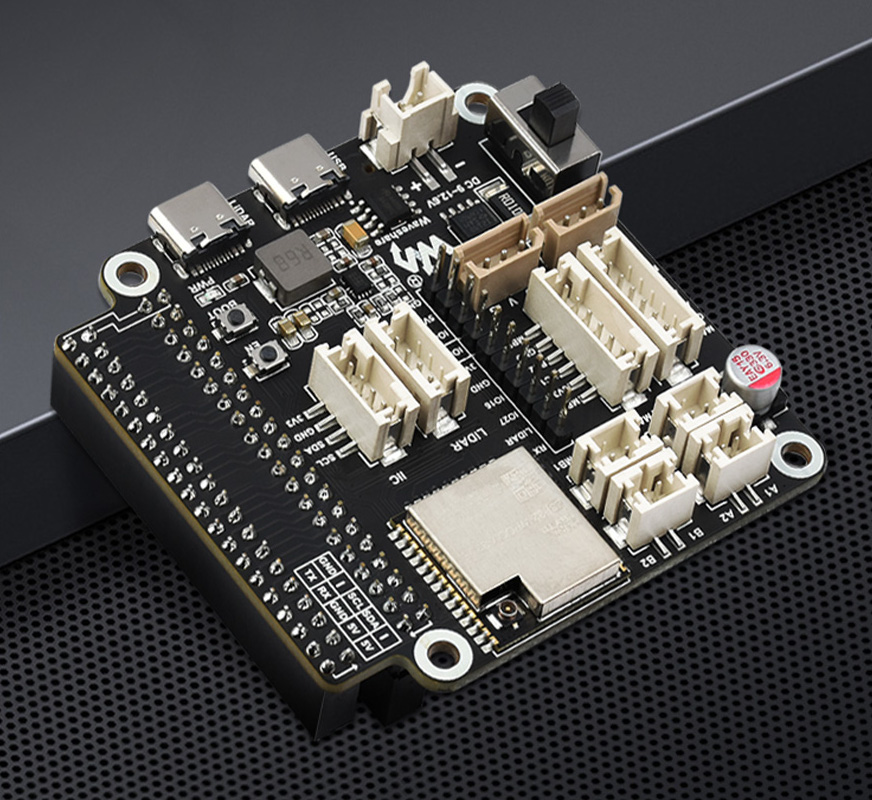

Der in ESP32 eingebettete Robotercontroller unterstützt die Steuerung der Servos über PWM-Signale, wodurch sich Parameter wie Drehwinkel und Geschwindigkeit frei einstellen lassen. Dies ermöglicht die Konstruktion komplexer Roboterbewegungen und -manipulationen.
Der On-Board-Controller mit ESP32-Chip ermöglicht die Fernsteuerung des Roboters durch Einrichtung eines eigenen WiFi-Hotspots. Das Webinterface ist über einen Webbrowser unter 192.168.4.1 zugänglich. Der Benutzer kann den Roboter mit den Richtungstasten steuern und die Geschwindigkeit einstellen sowie Befehle im JSON-Format senden, um verschiedene Funktionen zu steuern.
Die Einrichtung des WiFi-Hotspots und das Verbinden mit ihm wird in der Anleitung UGV02 Basic Use ausführlich beschrieben.

Der Zugriff auf die Webanwendungsschnittstelle erfolgt über die URL 192.168.4.1 in einem Internetbrowser.
 Der Roboter hat 6 Räder mit Gummireifen, von denen 4 angetrieben sind.
Der Roboter hat 6 Räder mit Gummireifen, von denen 4 angetrieben sind.
Hinweis: Bevor Sie das Produkt zum ersten Mal verwenden, müssen Sie die drei 18650-Batterien selbst kaufen und zusammensetzen. Wenn Sie sie zum ersten Mal anschließen, überprüfen Sie, ob die LED leuchtet. Wenn dies der Fall ist, bedeutet dies, dass die Batterien falsch angeschlossen sind (Plus an Minus und Minus an Plus) und umgekehrt eingesetzt werden müssen, da das Aufladen in der falschen Konfiguration gefährlich ist und eine Explosion verursachen kann.
| Fahrgestell - Anzahl der Räder | 6 |
| Fahrgestell - Typ | auf Rädern |
| Fahrgestell + Antrieb | Ja |
| Fahrgestell + Fahrer | Ja |
| PAKETBREITE | 26.5 cm |
| PAKETHÖHE | 27.5 cm |
| PAKETTIEFE | 25 cm |
| PAKETGEWICHT | 3.28 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!











