


























































































































































































































































































DoF ISM330DHCX -Sensor, ausgestattet mit einem 3-Achsen-Beschleunigungsmesser und einem 3-Achsen-Gyroskop. Es misst die lineare Beschleunigung im Bereich von ± 2 / ± 4 / ± 8 / ± 16 g und die Winkelgeschwindigkeit im Bereich von ± 125 / ± 250 / ± 500 / ± 1000 / ± 2000 / ± 4000 dps. Es hat einen Qwiic-Anschluss. Kommuniziert über I2C oder SPI. Es wird mit einer Spannung von 3 V oder 5 V betrieben.
DoF ISM330DHCX -Sensor, ausgestattet mit einem 3-Achsen-Beschleunigungsmesser und einem 3-Achsen-Gyroskop. Wird verwendet, um die lineare Beschleunigung im Bereich von ± 2 / ± 4 / ± 8 / ± 16 g bei einer Frequenz von 1,6 Hz bis 6,7 kHz und die Winkelgeschwindigkeit im Bereich von ± 125 / ± 250 / ± 500 / ± 1000 / ± zu messen 2000 / ± 4000 dps bei einer Frequenz von 12,5 Hz bis 6,7 kHz. Sensoren dieser Art werden in Smartphones, Tablets und verschiedenen Arten von Videospiel-Controllern verwendet. Es hat auch Qwiic -Anschlüsse für eine einfache Verbindung. Kommuniziert über I2C oder SPI. Es wird mit einer Spannung von 3 V oder 5 V betrieben. Das Modul verfügt über zusätzliche Kalibrierungs- und Kompensationsschaltungen, um eine bessere Leistung in einem weiten Temperaturbereich zu gewährleisten: von -40 ° C bis 105 ° . Es hat auch zusätzliche Funktionen wie Berührungserkennung, Aktivität, Schrittzähler und einen Kern für maschinelles Lernen, mit dem Sie einige grundlegende Gesten erkennen können.
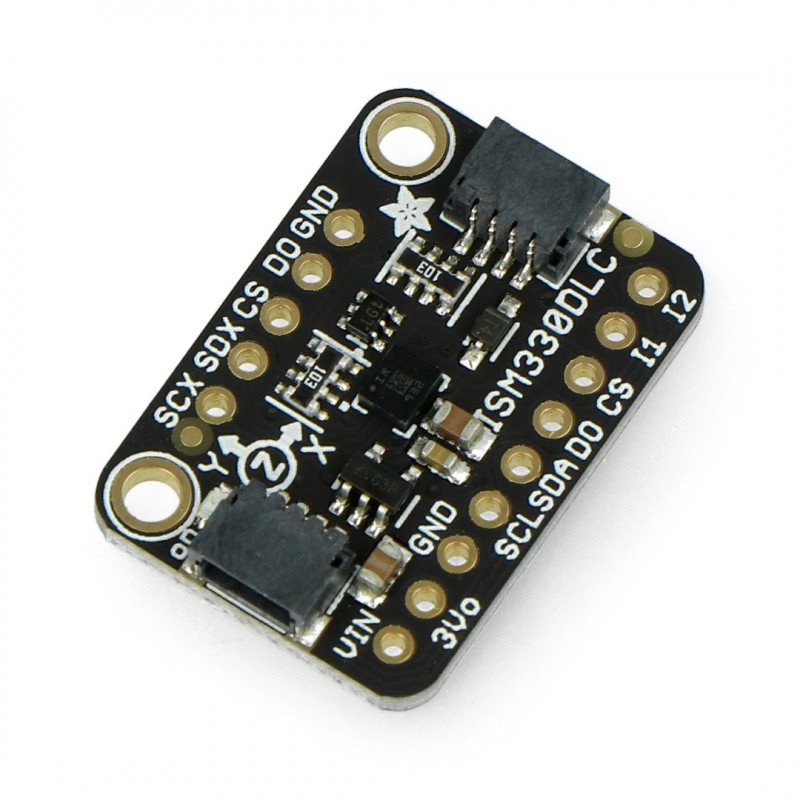
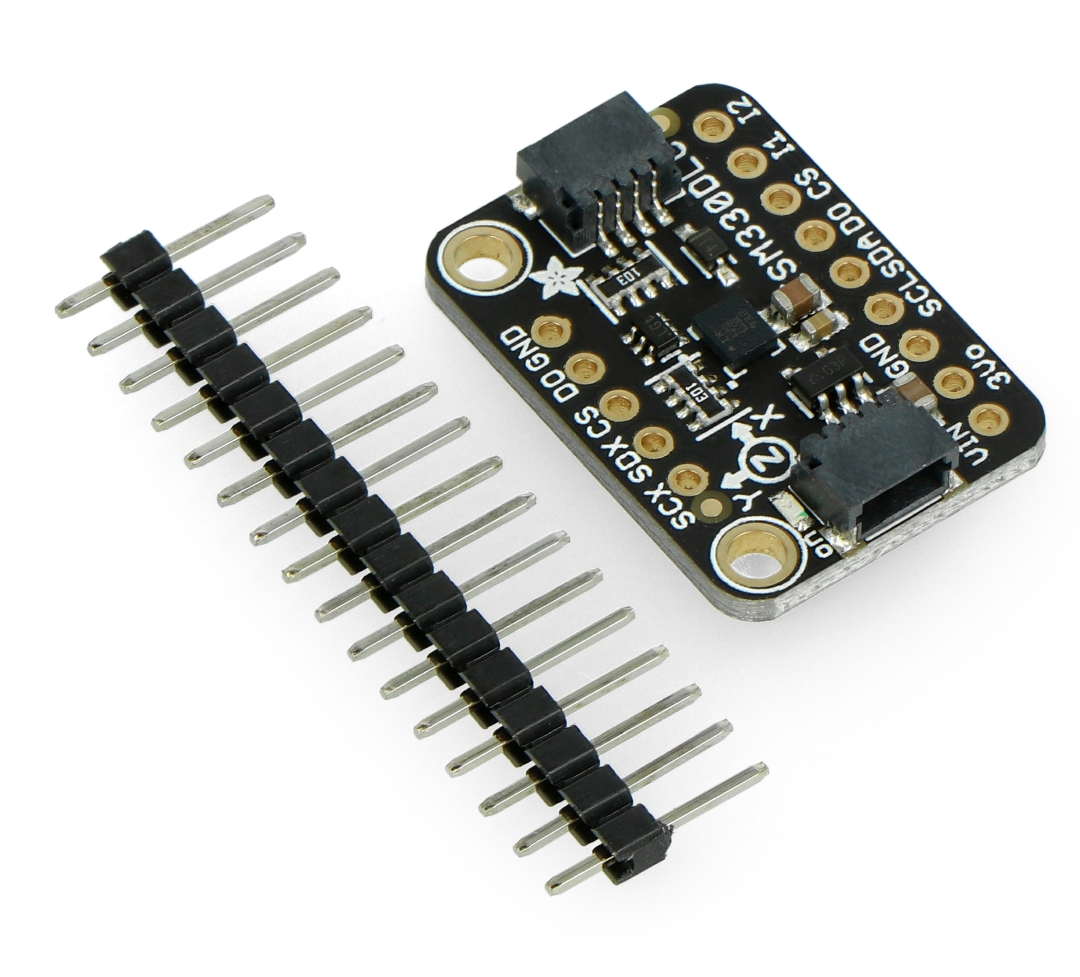
Der Sensor kommuniziert über die I2C- oder SPI-Schnittstelle. Es wird mit einer Spannung von 3 V oder 5 V betrieben. Das Set enthält einen 2,54-mm-Goldstiftstreifen zum Selbstlöten .
| Name | Beschreibung |
|---|---|
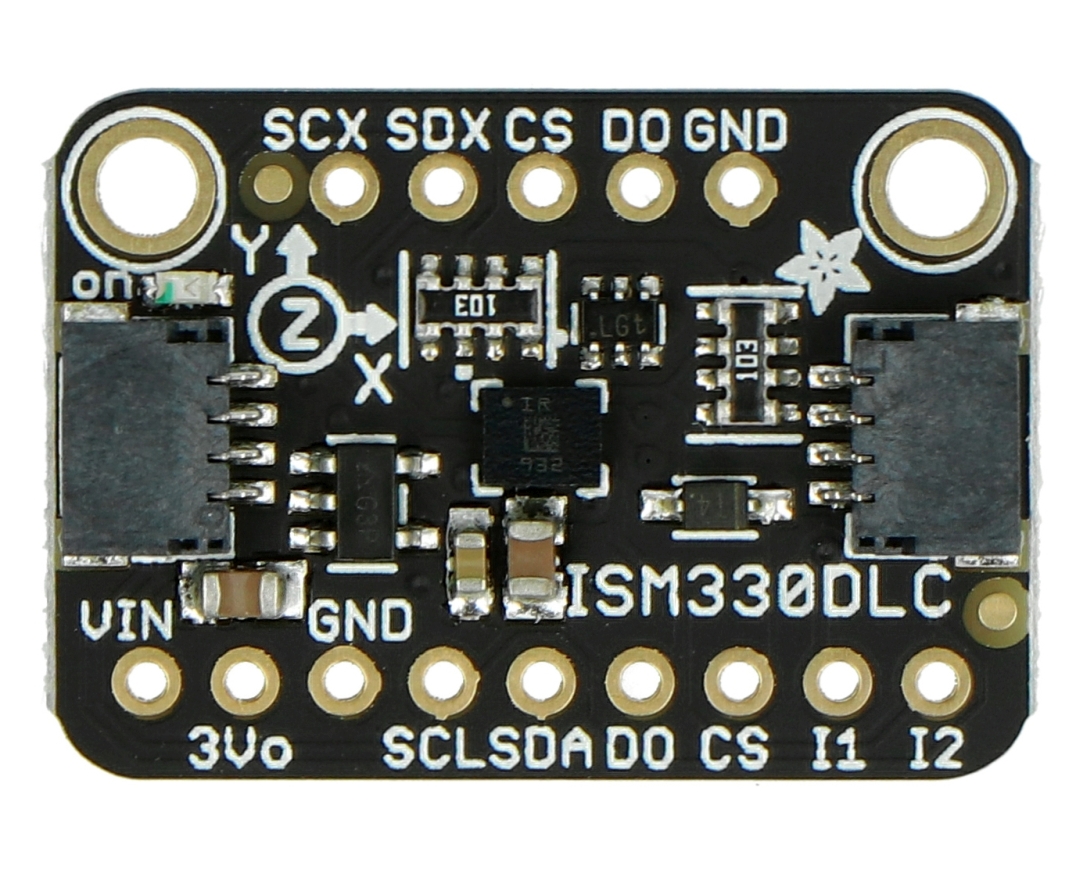
| SCX, SDX, CS, DO | Pins für fortgeschrittene Benutzer werden verwendet, um einen Sensor mit einem anderen Sensor zu verbinden. |
| Fahrgestellnummer | Die Eingangsspannung reicht von 3V bis 5V. |
| 3Vo | Die Ausgangsspannung von 3,3 V bei einer Kapazität von 100 mA. |
| Masse | Die Masse des Systems. |
| SCL | Die Taktleitung des I2C-Busses. |
| SDA | Die Datenleitung des I2C-Busses. |
| SCK | Clock-Pin des SPI-Busses. |
| NIEDER | Datenausgabe des SPI-Busses. |
| SDI | Dateneingang des SPI-Busses. |
| CS | Chipauswahl. Sollte für SPI niedrig sein. |
| Ich1 | Haupt-Interrupt-Pin. Es kann so konfiguriert werden, dass es niedrig wird, wenn neue Bedingungen verfügbar sind, z.B. neue Messdaten verfügbar. Mehr in der Dokumentation . |
| Ich2 | Haupt-Interrupt-Pin. Es kann so konfiguriert werden, dass es niedrig wird, wenn neue Bedingungen verfügbar sind, z.B. neue Messdaten verfügbar. Mehr in der Dokumentation . |
| D0 | Adressauswahl-Pin. Das Aktivieren des High-Zustands oder das Löten des Jumpers ändert die Adresse von 0x6A auf 0x6B. |
Das Produkt ist mit Arduino und Raspberry Pi kompatibel
Um die Arbeit mit dem Modul zu erleichtern, Der Hersteller hat eine Bedienungsanleitung mit einem Beispielprogramm für Arduino und Raspberry Pi sowie Projektdateien mit einer Bibliothek vorbereitet.
6DoF IMU ISM330DHCX-Sensor.
ISM330DHCX 6DoF IMU – 3-Achsen-Beschleunigungsmesser und Gyroskop – Adafruit 4502 eignet sich für den Einsatz in Auswuchtrobotern, DIY-Drohnen sowie tragbaren HMI-Controllern auf Basis von Gestenerkennung.
Das Modul enthält ein 6-Achsen-ISM330DHCX-Sensorsystem von ST Microelectronics (hergestellt in iNEMO-Technologie) sowie einen eingebauten Logikpegelumsetzer mit Pull-up-Widerständen und einem linearen Stabilisator.
Der ISM330DHCX-Chip ist ein fortschrittliches SoC-Modul, das ein 3-Achsen-MEMS-Gyroskop, einen 3-Achsen-MEMS-Beschleunigungsmesser, eine SPI/I2C-Schnittstelle sowie einen innovativen integrierten Rechenkern enthält, der eine Reihe von maschinellen Lernalgorithmen für die automatische Erkennung von einigen unterstützt gemeinsame Gesten.
Interessanterweise kann das System – zusätzlich zu den eingebauten MEMS- 6DoF -Strukturen und dem internen Temperatursensor – als Hub für den Anschluss externer Sensoren fungieren, was den Betrieb von Multisensorsystemen in besonders anspruchsvollen Anwendungen vereinfacht.
| Niebezpieczne | Komponente |
| PAKETBREITE | 4.5 cm |
| PAKETHÖHE | 1.5 cm |
| PAKETTIEFE | 2.5 cm |
| PAKETGEWICHT | 0.004 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!

Produktinformation
Das Produkt ist eine Komponente, die für die weitere Montage/den Prototypenbau bestimmt ist. Es stellt kein eigenständiges fertiges Produkt im Sinne der Vorschriften über die Produktsicherheit dar.
Dane GPSR
Herkunftsland: der Vereinigten Staaten
Hersteller-Kontaktdaten: Adafruit Industries LLC, 168 39TH ST STE 1905CC, Brooklyn, NY 11232
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]


