



















































































































































































































































































































- EOL
")

")
")
")
")
")
")
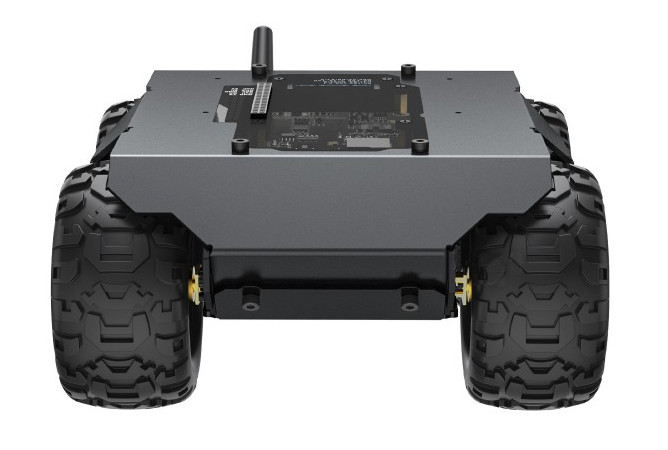
Der Wave Rover ist ein vielseitiges, mobiles Roboterchassis mit 4 -Rad-Antrieb und robuster Metallkonstruktion, das perfekt mit verschiedenen Geländebedingungen zurechtkommt. Ausgestattet mit einem ESP32-Controller mit integriertem WiFi und Bluetooth, ermöglicht er die Kommunikation mit verschiedenen Minicomputern wie Raspberry Pi und Jetson Nano. Dank seiner Gummireifen bietet er auch in schwierigem Gelände eine hervorragende Bodenhaftung und Dämpfung bei gleichzeitiger Stabilität und Bewegungskontrolle. Darüber hinaus ist der Wave Rover mit vier DC-N20-Motoren ausgestattet, die für hohe Leistung und Effizienz im Betrieb sorgen. Das Chassis wird von einem 3S-USV-Modul mit drei 18650 Li-Ion-Akkus versorgt, so dass der Roboter unterbrechungsfrei mit Strom versorgt werden kann, was für Anwendungen, die einen längeren Betrieb erfordern, von entscheidender Bedeutung ist. Der Bausatz enthält auch eine Montageplatte für verschiedene Minicomputer und zusätzliche Module wie Lidar-Sensoren oder eine Schwenk-/Neige-Kamera, die die Entwicklungs- und Personalisierungsmöglichkeiten des Roboters noch erweitern. Der Wave Rover ist nicht nur ein robustes Fahrgestell, sondern auch eine Plattform für Experimente und die Entwicklung fortgeschrittener Projekte in der mobilen Robotik.
Der Hersteller hat ein Benutzerhandbuch erstellt, das den Einstieg in das Produkt erleichtert.

Wave Rover - 4-Rad-Roboter-Chassis mit Antrieb und ESP32-Controller - Waveshare 25377.
 Roboter-Chassis mit 4-Rad-Antrieb.
Roboter-Chassis mit 4-Rad-Antrieb.Das Chassis des Roboters ermöglicht es Ihnen, seine Bewegung, Geschwindigkeit und Richtung mit Befehlen im JSON-Format zu steuern, um Aufgaben zu automatisieren. Der Roboter kann diese Befehle sowohl aus der Ferne über eine Webanwendung als auch über verschiedene Schnittstellen wie serielle Schnittstelle, USB, HTTP, ESP-NOW usw. empfangen.
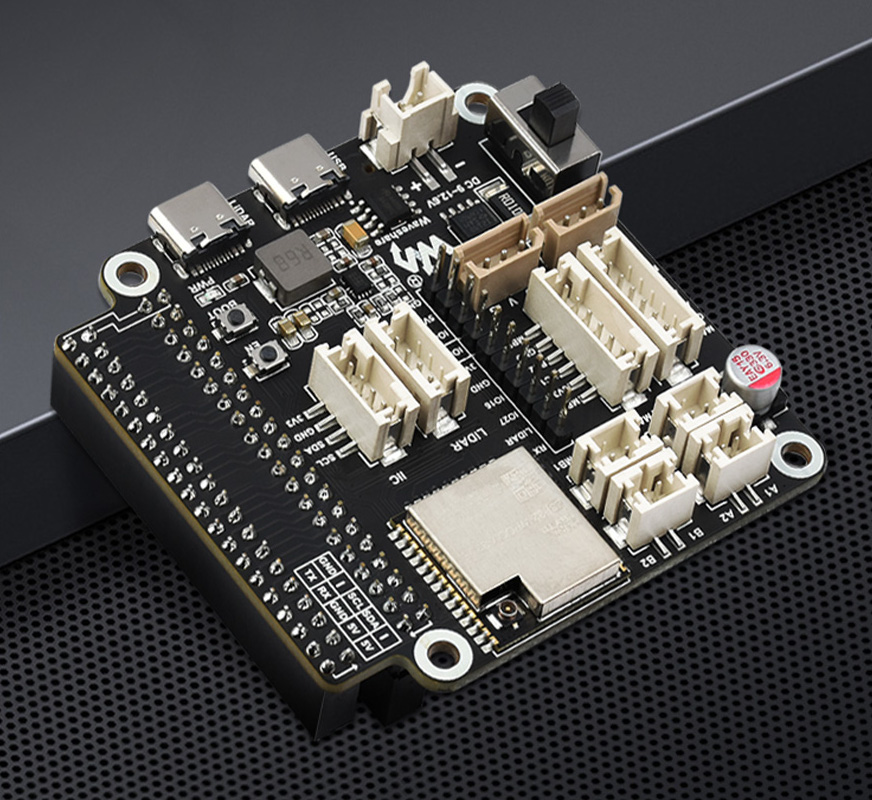

Der eingebettete ESP32-Robotercontroller ermöglicht die Steuerung der Servos über PWM-Signale, was eine flexible Anpassung von Parametern wie Drehwinkel und Geschwindigkeit ermöglicht. Dies ermöglicht die Konstruktion komplexer Roboterbewegungen und -manipulationen.
Dank des eingebauten Controllers mit ESP32-Chip kann der Roboter über einen eigenen WiFi-Hotspot ferngesteuert werden. Das Webinterface ist über einen Webbrowser unter 192.168.4.1 zugänglich und ermöglicht es dem Benutzer, die Bewegung des Roboters über Richtungstasten zu steuern und die Geschwindigkeit anzupassen. Außerdem können Befehle im JSON-Format gesendet werden, um verschiedene Funktionen zu steuern.
Die Einrichtung des WiFi-Hotspots und die Verbindung mit ihm wird in der Anleitung im Abschnitt WAVE ROVER Grundlegende Nutzung ausführlich beschrieben.

Der Zugriff auf die Webanwendungsschnittstelle erfolgt durch Aufruf der URL 192.168.4.1 in einem Webbrowser.

Das Gehäuse enthält eine Montageplatte für verschiedene Minicomputer und zusätzliche Module.
 Das Gehäuse wird von einem 3S-USV-Modul mit 3 18650 Li-Ion-Akkus versorgt.
Das Gehäuse wird von einem 3S-USV-Modul mit 3 18650 Li-Ion-Akkus versorgt.Bitte beachten Sie, dass Sie die drei 18650-Akkus selbst kaufen und einsetzen müssen, bevor Sie das Produkt zum ersten Mal verwenden. Wenn Sie sie zum ersten Mal anschließen, überprüfen Sie, ob die LED leuchtet. Wenn dies der Fall ist, bedeutet dies, dass die Batterien falsch angeschlossen sind (Plus an Minus und Minus an Plus) und umgekehrt eingesetzt werden müssen, da das Aufladen in der falschen Konfiguration gefährlich ist und eine Explosion verursachen kann.
| Fahrgestell - Anzahl der Räder | 4 |
| Fahrgestell - Typ | auf Rädern |
| Fahrgestell + Antrieb | Ja |
| Fahrgestell + Fahrer | Ja |
| PAKETBREITE | 25 cm |
| PAKETHÖHE | 22 cm |
| PAKETTIEFE | 13 cm |
| PAKETGEWICHT | 1.205 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!
")
")
")
")
")
")
")
")
")
")
")