












































































































































































































































































































- EOL






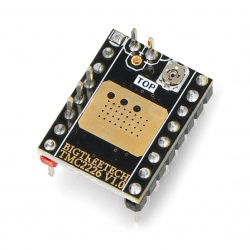
Das SparkX Qwiic IMU-Modul MPU-9250 ist eine 9-achsige Trägheitsnavigationseinheit (IMU). Es hat die Funktionen eines Gyroskops, Beschleunigungsmessers und Magnetometers. Sie können damit einen selbstbalancierenden Roboter oder sogar einen Autopiloten für ein Flugzeug / eine Drohne bauen. Es ist voll kompatibel mit Arduino.
Warnung! Der Verkauf des Produkts ist abgeschlossen. Schauen Sie sich die anderen in dieser Kategorie an . |
Das SparkX Qwiic IMU-Modul MPU-9250 ist eine 9-achsige Trägheitsnavigationseinheit (IMU) . Es hat die Funktionen eines Gyroskops , Beschleunigungsmessers und Magnetometers . Sie können damit einen selbstbalancierenden Roboter oder sogar einen Autopiloten für ein Flugzeug / eine Drohne bauen. Das MPU-9250- System fungiert als 3-Achsen-Gyroskop und 3-Achsen-Beschleunigungsmesser und das AK8963-System als 3-Achsen-Magnetometer . Im Vergleich zur Vorgängerversion des Moduls (EOL MPU-9150) hat es einen um 44 % geringeren Energieverbrauch , und im Vergleich zu den meisten konkurrierenden Modulen ist das Gyroskop dreimal genauer und die Magnetometerskala viermal größer . Dies wurde vor allem dank des 16-Bit-Analog-Digital-Wandlers erreicht.
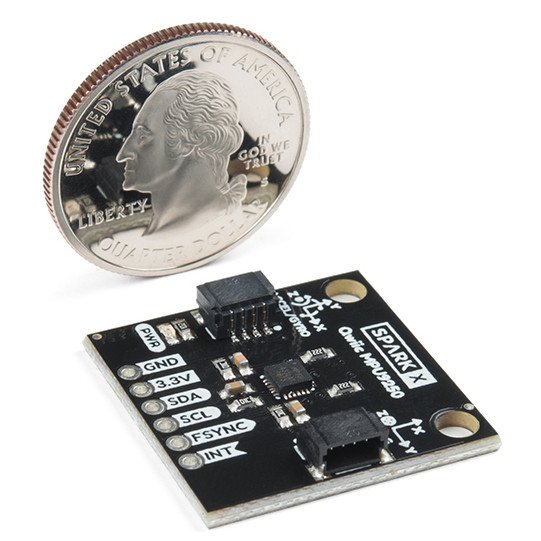
SparkX Qwiic IMU MPU-9250 verwendet für die Kommunikation die I2C-Schnittstelle mit den Standardadressen 0x69 oder 0x68. Darüber hinaus steht der FSYNC-Pin auch für die Rahmensynchronisierung und INT für die programmgesteuerte Interrupt-Steuerung zur Verfügung . Der Hersteller stellt zwei Arduino -Bibliotheken und Beispiel-Quellcodes zur Verfügung.
Nützliche Links |
| PAKETBREITE | 0.001 cm |
| PAKETHÖHE | 0.001 cm |
| PAKETTIEFE | 0.001 cm |
| PAKETGEWICHT | 0.001 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!






