



































































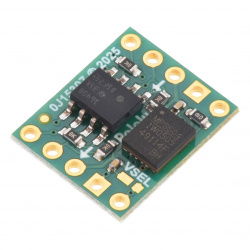



































































































































































































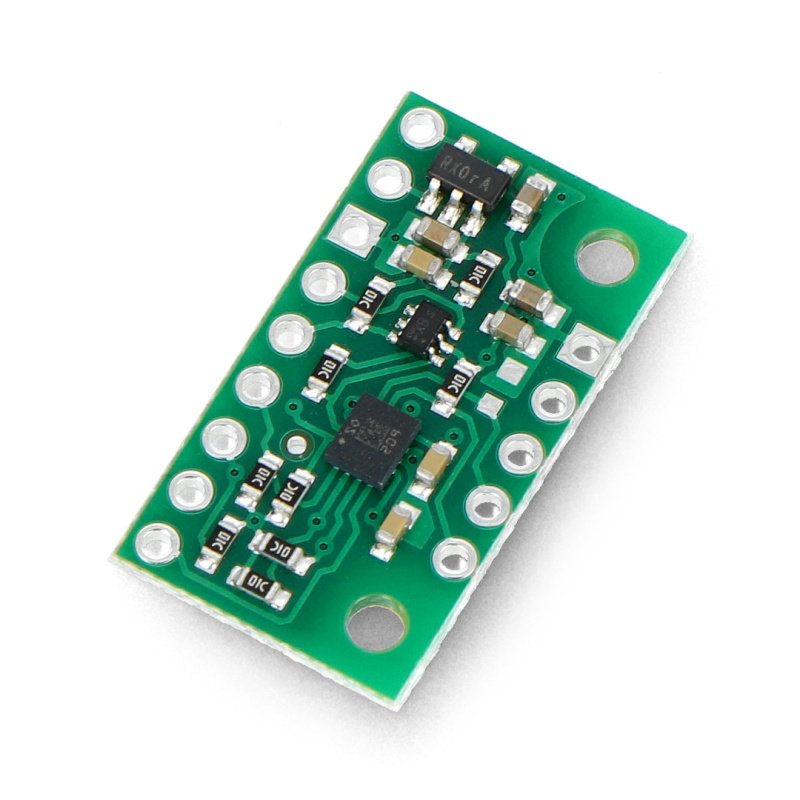







Der LSMDDSO -Sensor von Pololu ist der Nachfolger des älteren LSM6DS33-Moduls und eine Kombination aus einem 3-Achsen-Beschleunigungssensor und einem Gyroskop. Damit können Sie 6 Größen messen: Beschleunigung X, Y, Z im Bereich von ± 2 g bis ± 16 g und Winkelgeschwindigkeit X, Y, Z im Bereich von ± 125 ° / s bis ± 2000 ° / s . Es verwendet den I2C/I3C- oder SPI -Bus für die Kommunikation. Das Modul arbeitet mit einer Spannung von 1,8 V bis 5,5 V, hat einen eingebauten Spannungsregler von 3,3 V.
Der Sensor LSMDDSO von Pololu ist der Nachfolger des älteren Moduls LSM6DS33 zur Messung des Beschleunigungsfeldes und der Winkelgeschwindigkeit in drei Achsen. Es zeichnet sich durch geringe Größe, geringen Energieverbrauch und einfache Bedienung aus. Es verwendet den I2C/I3C- oder SPI -Bus für die Kommunikation. Die Ausgänge sind Lötpads, an die Goldpin-Anschlüsse (nicht im Lieferumfang enthalten) gelötet werden können, sodass der Sensor über Drähte angeschlossen oder direkt in das Steckbrett gesteckt werden kann. Das Modul ist mit einem 3,3-V-Spannungsregler ausgestattet, dank dessen es möglich ist, mit einer Spannung von 1,8 V bis 5,5 V zu arbeiten. Der Reglerausgang steht am VDD-Pin zur Verfügung und kann externe Schaltungen mit einem Strom von bis zu 150 mA versorgen.
Arduino-kompatibles Produkt
Der Hersteller hat auf GitHub eine Bibliothek für Arduino- Anwender vorbereitet.
LSM6DSO - 3-Achsen-Beschleunigungsmesser und Gyroskop I2C / I3C / SPI.
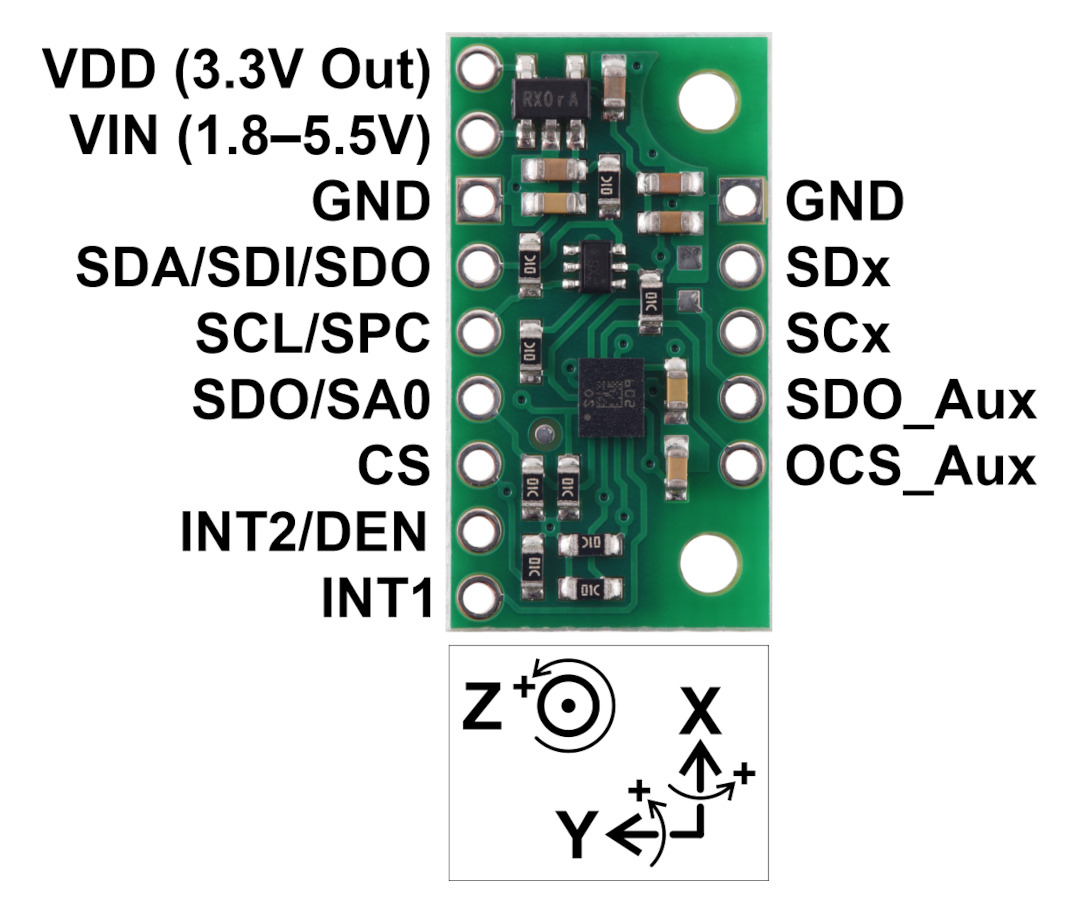
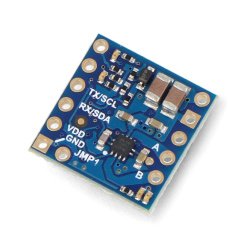
Pins des LSM6DSO-Sensors.
Der Sensor hat 13 Zuleitungen in Form von Lötpads zur Montage vonGoldpin -Steckern - Raster 2,54 mm (nicht im Lieferumfang enthalten) oder Anschlusskabel. Die SCL- und SDA-Pins tolerieren eine Spannung über 3,3 V, da sie an einen Spannungswandler angeschlossen sind. Die restlichen Pins sind nicht damit verbunden und vertragen keine 5 V, daher sollten sie über einen externen Logikpegelwandler verbunden werden.
| Name | Beschreibung |
|---|---|
| VDD | Geregelter Ausgang 3,3 V, maximal 150 mA. |
| Fahrgestellnummer | Systemstromversorgung von 1,8 V bis 5,5 V. Der Konverter richtet die SCL- und SDA-Pins für die I2C- und SPI-Busse auf diesen Pegel aus. |
| Masse | Systemgewicht. |
| SDA/SDI/SDO | Datenleitung für I2C / I3C und Dateneingangsleitung für SPI. High ist gleich VIN, Low ist 0V. |
| SCL/SPC | Taktleitung für I2C/I3C und SPI. High ist gleich VIN, Low ist 0V. |
| SDO/SA0 | Datenausgabeleitung für SPI. High-Zustand ist gleich VDD, Low-Zustand ist 0 V. Er arbeitet mit einer Spannung von 3,3 V. |
| CS | Datenbusauswahl. Der hohe Zustand (VDD) aktiviert die I2C-Kommunikation (standardmäßig eingestellt). Der Low-Zustand aktiviert den SPI-Bus. |
| INT2 / DEN | Programmierbarer Interrupt. Funktioniert mit einer Spannung von 3,3 V. Details in der Dokumentation . |
| INT1 | Programmierbarer Interrupt. Arbeitet mit einer Spannung von 3,3 V. Details in der Dokumentation . |
| SDx | Modus 2: I2C-Stammdatenleitung (MSDA). Modus 3/4: Hilfs-SPI-Datenleitung (SDI). Dieser Pin ist nicht mit dem Spannungsregler verbunden. |
| SCx | Modus 2: I2C-Haupttaktleitung (MSCL). Modus 3/4: Hilfs-SPI-Taktleitung (SCK). Dieser Pin ist nicht mit dem Spannungsregler verbunden. |
| SDO_Aux | Modus 3/4: 4-adrige SPI-Hilfsleitung. Dieser Pin ist nicht mit dem Spannungsregler verbunden. |
| OCS_Aux | Modus 3/4: Aktivierung des 4-zeiligen Hilfs-SPI. Dieser Pin ist nicht mit dem Spannungsregler verbunden. |
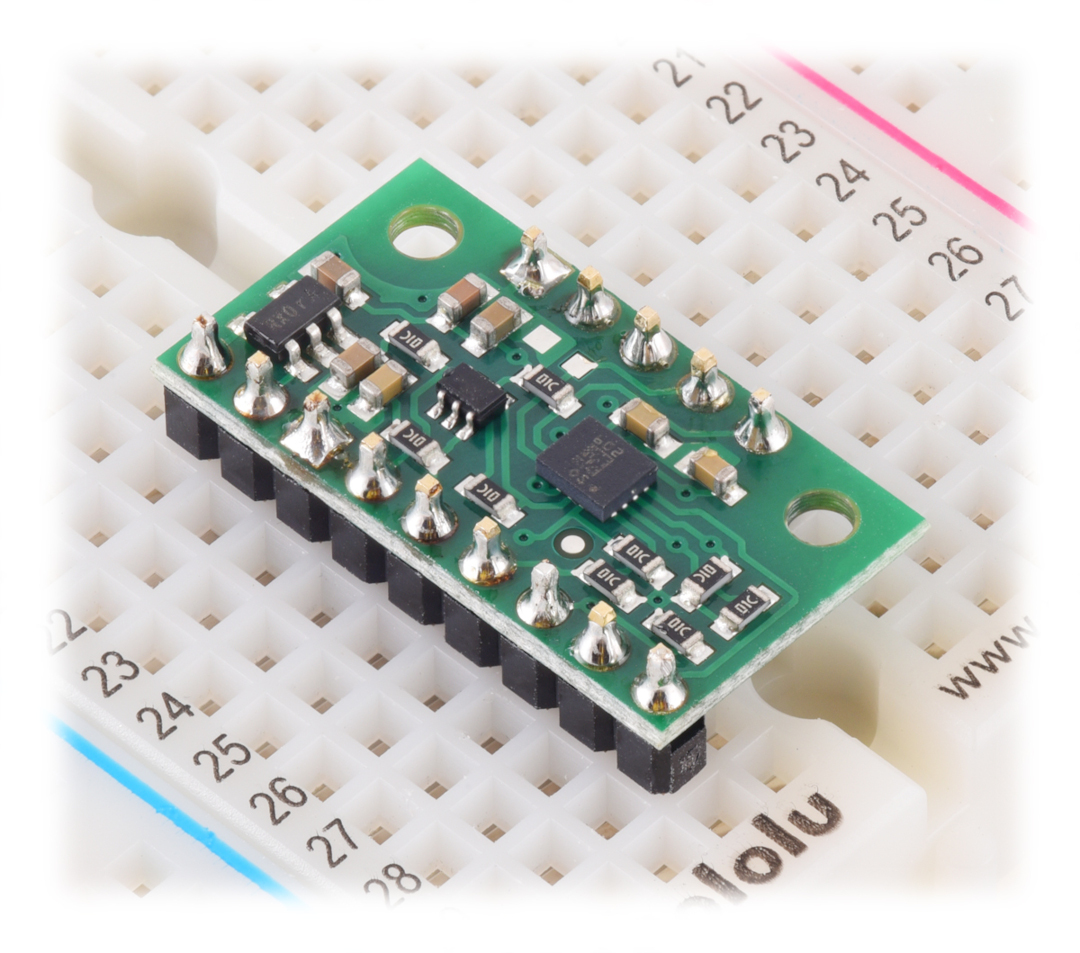
Modul mit gelöteten Anschlüssen (nicht im Lieferumfang enthalten).
| Niebezpieczne | Komponente |
| PAKETBREITE | 7.5 cm |
| PAKETHÖHE | 8.5 cm |
| PAKETTIEFE | 0.2 cm |
| PAKETGEWICHT | 0.002 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!
Herkunftsland: der Vereinigten Staaten
Hersteller-Kontaktdaten: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin
Anweisungen und Dokumente





