



































































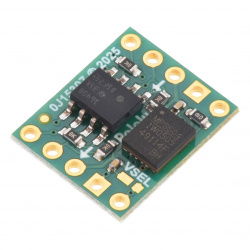



































































































































































































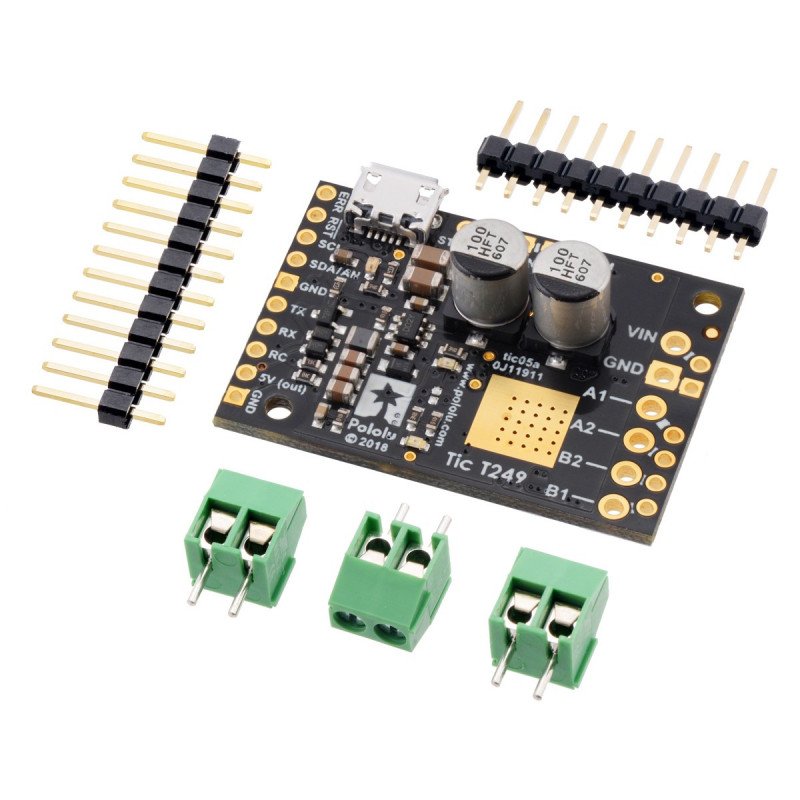





Schrittmotortreiber basierend auf dem TB67S249FTG -System. Es wird mit einer Spannung im Bereich von 10 - 47 V betrieben, mit einer maximalen Stromaufnahme von 4,5 A pro Spule. Maximale Auflösung: 1/32 Schritt. Das Modul erlaubt den Stromfluss bis 1,8 A ohne Kühlkörper. Der Controller unterstützt sechs Steuerschnittstellen: USB, TTL, I2C, Analog, Rechteck-Encoder, RC.
Das System ermöglicht es Ihnen, einen Schrittmotor mit einem Gerät zu steuern, mit dem Sie logische Zustände erzeugen können, z. B. Arduino , STM32Discovery , Raspberry Pi oder einen beliebigen Mikrocontroller . Der Treiber kann über USB konfiguriert, getestet und überwacht werden und läuft unter Windows, Linux und macOS.
Das Pololu-Modul ist sehr einfach zu bedienen. Um den Motor um einen Schritt zu drehen, geben Sie einen High-Zustand am STEP-Pin (logische Eins) ein, eine weitere Folge von Nullen und Einsen bewegt den Motor um einen Schritt usw. Uhr, High-Zustand - Gegenteil). Die Steuerung hat auch die Möglichkeit, die Auflösung des Motorbetriebs auszuwählen.
Der Hersteller stellt eine umfassende Bedienungsanleitung zur Verfügung.
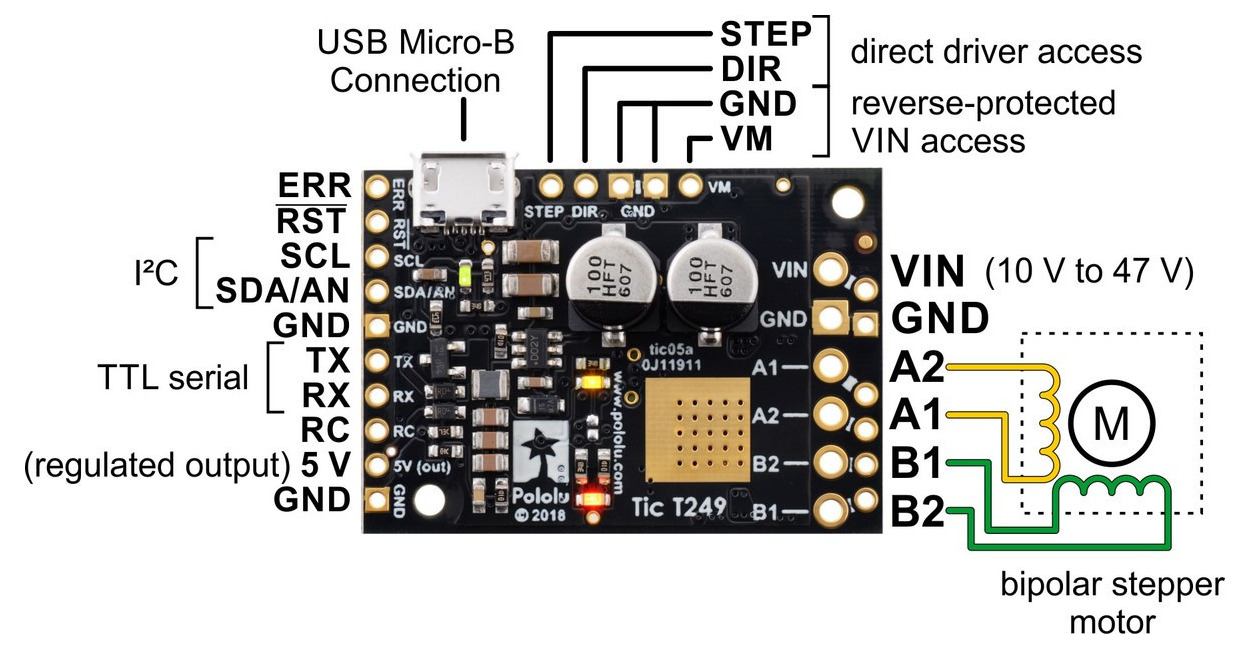
Die Abbildung zeigt den Mindestanschluss des Controllers.
Um einen bipolaren Schrittmotor zu steuern, schließen Sie das System wie in der folgenden Abbildung gezeigt an. Ist die Nennspannung des Motors kleiner als die erforderliche Reglerversorgung (10 V), muss die Stromgrenze manuell über das Potentiometer eingestellt werden.
Zur Spannungsversorgung wird ein 5-V-Regler benötigt (es wird kein externes Logiknetzteil benötigt), der an den 5-V-Pin angeschlossen werden sollte Die Motorversorgungsspannung im Bereich von 10 V bis 47 V wird an den VIN-Pin geliefert. Das System kann Motoren mit einer Nennspannung kleiner als die erforderlichen 10 V ansteuern. Dazu sollte die maximale Stromaufnahme durch das Potentiometer begrenzt werden, um den zulässigen Motorstrom nicht zu überschreiten. Beispiel: Bei einem Motor mit einem Widerstand von 5 Ω pro Spule und einer Stromaufnahme von 1 A beträgt die Nennversorgungsspannung 5 V. Bei einer Versorgung mit 12 V sollte der Strom so begrenzt werden, dass er 1 A nicht überschreitet.
Warnung!
Das Anschließen und Trennen des Motors bei eingeschalteter Steuerung kann das System beschädigen.
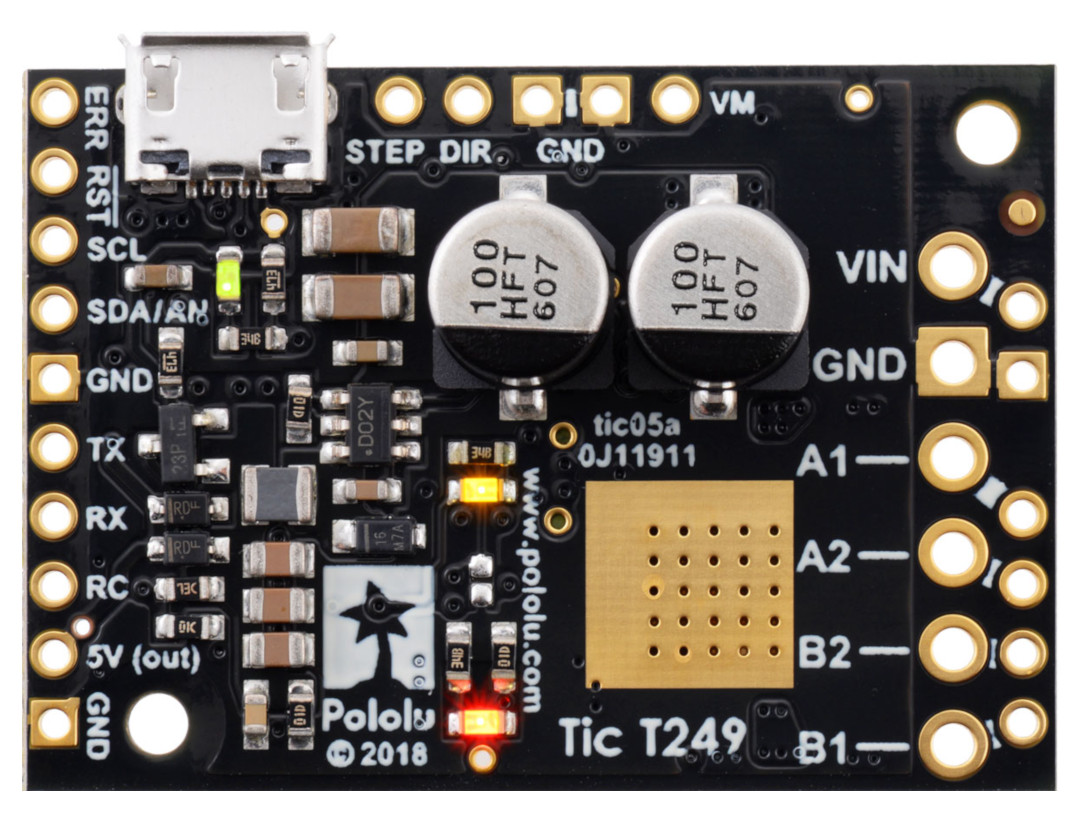
Auf der Platine befinden sich drei LEDs: grün, rot, gelb. Grün bedeutet Kommunikation über USB. Der rote ist mit dem ERR-Pin verbunden, wenn er aufleuchtet, bedeutet dies einen Fehler. Gelb zeigt den Status des Schrittmotors an und gibt Hinweise auf eventuelle Fehler. Eine ausführliche Beschreibung finden Sie in der Dokumentation auf der Herstellerseite.
Die Platine ist so ausgelegt, dass sie bei einer Stromaufnahme von ca. 1,8 A pro Spule Wärme abführen kann. Ist der Strom viel höher, sollte ein externer Kühlkörper verwendet werden, für dessen Montage Sie Wärmeleitkleber verwenden können.
Nützliche Links |
| Stromspannung aus | 10,0 V |
| Stromspannung Nieder | 47,0 V |
| Aktuelle Effizienz | 4,5 A |
| Anzahl der Kanäle | 1 |
| PAKETBREITE | 8.2 cm |
| PAKETHÖHE | 1.2 cm |
| PAKETTIEFE | 7.7 cm |
| PAKETGEWICHT | 0.011 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!

Herkunftsland: der Vereinigten Staaten
Hersteller-Kontaktdaten: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin
Anweisungen und Dokumente



