- Neu
- Kostenloser Versand


BleBox openSensor – WLAN-Tür- und Fensteröffnungssensor – Schwarz


BleBox twinMagnet – Magnetzubehör für den openSensor – Anthrazit



WiFi 7 Tri-Band drahtlose Netzwerkkarte - Edmiax EW-7822UN7

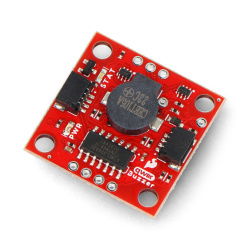
Stromsensor ACS723 - 5A Stromsensor - SparkFun SEN-13679



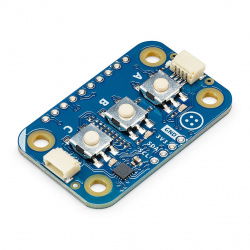
Echtzeituhrmodul RTC RV-8803 Qwiic - SparkFun BOB-16281


Filament Devil Design PETG 1,75 mm 2 kg - Weiß
Produkte, deren Verkauf abgeschlossen ist.
Auch prüfen