

















































































































































































































Schrittmotortreiber mit einer Spannung von 6 V bis 35 V, mit einer maximalen Stromaufnahme von 3 A pro Spule. Die maximale Auflösung beträgt 1/128 Schritt. Das Modul ermöglicht einen kontinuierlichen Stromfluss von bis zu 1,8 A ohne Kühlkörper. Es kommuniziert digital und über den SPI-Bus.
Das System ermöglicht es Ihnen, einen Schrittmotor mit einem Gerät zu steuern, mit dem Sie logische Zustände erzeugen können, z. B. Arduino , STM32Discovery , Raspberry Pi oder einen beliebigen Mikrocontroller . Das Modul AMIS-30543 ist sehr einfach zu bedienen.
Um den Motor um einen Schritt zu drehen, geben Sie den High-Zustand (logische Eins) am NXT (STEP)-Pin ein, eine weitere Folge von Nullen und Einsen bewegt den Motor um einen Schritt usw. im Uhrzeigersinn, Low-Zustand - umgekehrt). Die Steuerung hat auch die Möglichkeit, die Auflösung des Motorbetriebs auszuwählen und den maximalen Strom zu begrenzen. Diese Einstellungen werden über den SPI-Bus vorgenommen.

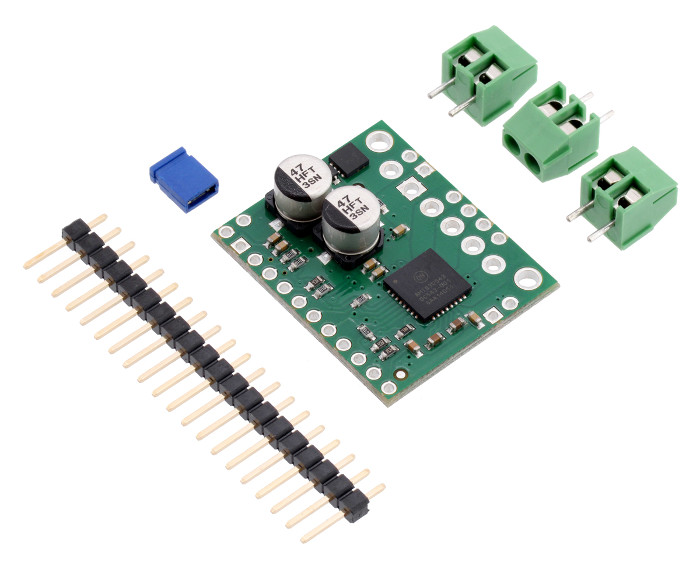
Das System verfügt über Bohrungen im Raster 2,54 mm zur Montage von Goldpin-Steckern oder Schraubbuchsen. Die Stecker sind im Kit zum Selbstlöten enthalten.
| Stift | Typ | Beschreibung |
|---|---|---|
| VMOT | IN | Motorversorgungsspannung von 6 bis 30 V. Es hat einen Schutz gegen Verpolung. |
| VBB | AUS | Die Ausgabe der Versorgungsspannung der Motoren nach der Verpolungsschutzschaltung. |
| Masse | Die Masse des Systems. | |
| MOTXP | AUS | Motoranschluss Ausgang: PLUS Spule X. |
| MOTXN | AUS | Ausgang Motoranschluss: MINUS Spule X. |
| MOTYP | AUS | Ausgang Motoranschluss: PLUS Y-Spule. |
| MOTIN | AUS | Motoranschluss Ausgang: Y-Spule MINUS. |
| VDD | AUS |
Der Ausgang des Spannungsreglers 5 V. Er kann verwendet werden, um den Logikteil über den benachbarten IOREF-Pin zu versorgen, wenn das Modul mit einem 5-V-System arbeiten soll. Die Stromausbeute hängt von der Eingangsspannung VMOT ab:
|
| IOREF | IN | Alle Ausgangspins außer SLA werden auf die am IOREF-Pin gegebene Spannung hochgezogen. Daher sollte diese Spannung gleich der Betriebsspannung des Hauptsystems sein, z.B. bei der Kommunikation mit einem Arduino Uno, der mit 5V arbeitet, sollte der IOREF ebenfalls mit 5V beaufschlagt werden. |
| NXT | IN | Ein an den STEP-Pin gegebener Impuls bewirkt einen Schritt des Motors in die gewählte Richtung, indem der DIR-Pin den entsprechenden logischen Zustand erhält. Die Flanke, auf die der Controller reagiert, ist über den SPI-Bus wählbar, standardmäßig ist es eine steigende Flanke. |
| DIR | IN | Auswahl der Drehrichtung des Motors durch den Low-Zustand und den Anstieg. Die Richtung kann auch über den SPI-Bus eingestellt werden. |
| NIEDER | AUS | Ausgangsdaten (MISO) im SPI-Bus. |
| DI | IN | Eingangsdaten (MOSI) des SPI-Busses. |
| CLK | IN | Taktleitung des SPI-Busses. |
| CS | IN | Geräteauswahl (Chipauswahl) im SPI-Modus. Um das Modul zu betreiben, legen Sie den Low-Zustand fest. |
| CLR | IN | Systemzurücksetzung. Das Eintreten in den High-Status bewirkt das Zurücksetzen der internen Register. |
| IRREN | AUS | Ein Ausgang, der das Auftreten eines Fehlers durch Auftreten eines Low-Zustands signalisiert. Details des Fehlers können über den SPI-Bus ausgelesen werden. |
| POR / WD | AUS | Die Leitung erzeugt ein Low-State-Signal, das als Reset für eine andere Schaltung verwendet werden kann. |
| SLA | AUS | Analogausgang von 0 bis 5 V, dessen Signal proportional zum Gegen-EMK-Spannungspegel des Motors ist. Es hat einen Tiefpassfilter. |
|
Warnung! Das Anschließen und Trennen des Motors bei eingeschalteter Steuerung kann das System beschädigen. |

Der IOREF-Pin muss mit der Spannung verbunden werden, mit der die digitalen Aus- und Eingänge arbeiten. Um den Motor um einen Schritt zu drehen, geben Sie den High-Zustand am NEXT-Pin (logische Eins) ein, eine weitere Folge von Nullen und Einsen bewegt den Motor um einen Schritt usw. Uhr, Low-Zustand - umgekehrt). Andere Funktionen wie Maximalstrom oder Auflösung werden über den SPI-Bus eingestellt.
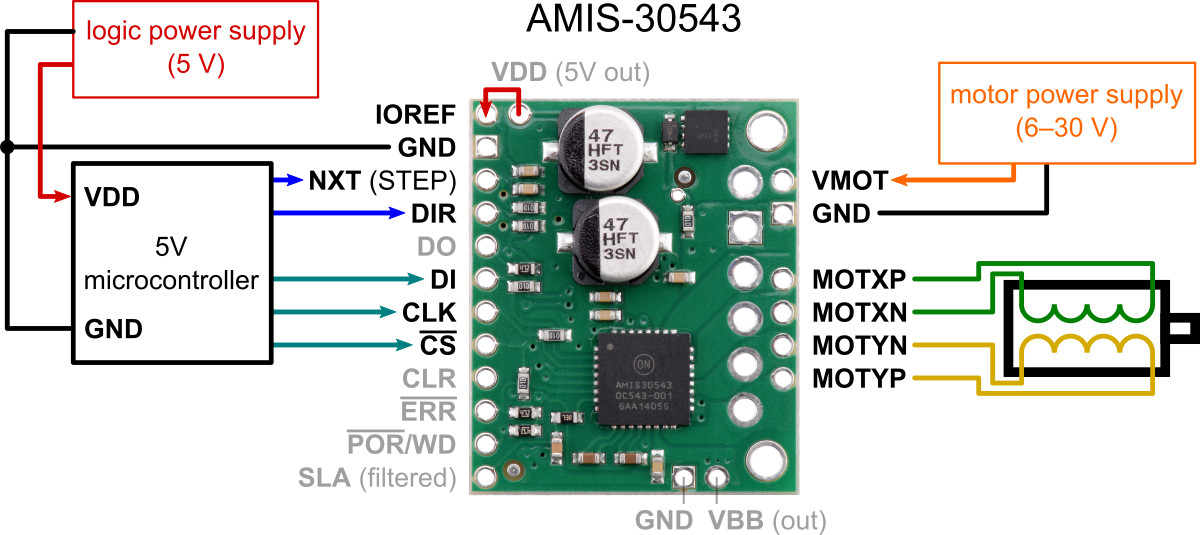
In diesem Fall können die IOREF-Pins mit dem benachbarten VDD-Pin verbunden werden. Der Rest des Teils ist analog zum vorherigen Punkt.
|
Das Produkt ist mit Arduino kompatibel Für Arduino-Anwender hat der Hersteller eine Bibliothek vorbereitet. |
Die Platine ist so ausgelegt, dass sie bei einer Dauerstromaufnahme von ca. 1,8 A pro Spule Wärme abführen kann. Wenn der Strom viel höher ist, sollte ein externer Kühlkörper verwendet werden, für die Montage können Sie Wärmeleitkleber verwenden.
Nützliche Links |
| PAKETBREITE | 8 cm |
| PAKETHÖHE | 10.5 cm |
| PAKETTIEFE | 1 cm |
| PAKETGEWICHT | 0.009 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!
Herkunftsland: der Vereinigten Staaten
Hersteller-Kontaktdaten: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin




















