













































































































































































































Effizienter Einkanal-DC-Motortreiber. Dauerstrom pro Kanal 21 A (kurzzeitig bis 100 A), Motorspannung 6,5 V bis 40 V, Logikspannung 1,8 V bis 5,5 V. Das Gerät verfügt außerdem über einen Stromflusssensor und die Möglichkeit, den Motorstrom zu begrenzen.
Mit dem Modul können Sie einen Gleichstrommotor steuern. Der Motor kann mit einer Spannung von 6,5 bis 40 V mit einer Dauerstromaufnahme von bis zu 21 A, kurzzeitig (für 10 ms) bis zu 100 A betrieben werden. Die Geschwindigkeit kann durch das PWM-Signal gesteuert werden, die Richtung mittels der digitale Ausgang DIR - gibt den niedrigen Zustand (logisch 0) oder hoch (logisch 1). Das Gerät verfügt außerdem über einen Stromflusssensor und die Möglichkeit, den Motorstrom zu begrenzen.
|
Wenn Sie den Akku voll aufgeladen verwenden, kann die tatsächliche Spannung viel höher sein als die Nennspannung. Daher empfiehlt der Hersteller, Akkus mit einer Nennausgangsspannung von bis zu 28 V zu verwenden. |
 Das Set enthält einen Treiber und Anschlüsse zum Selbstlöten.
Das Set enthält einen Treiber und Anschlüsse zum Selbstlöten.
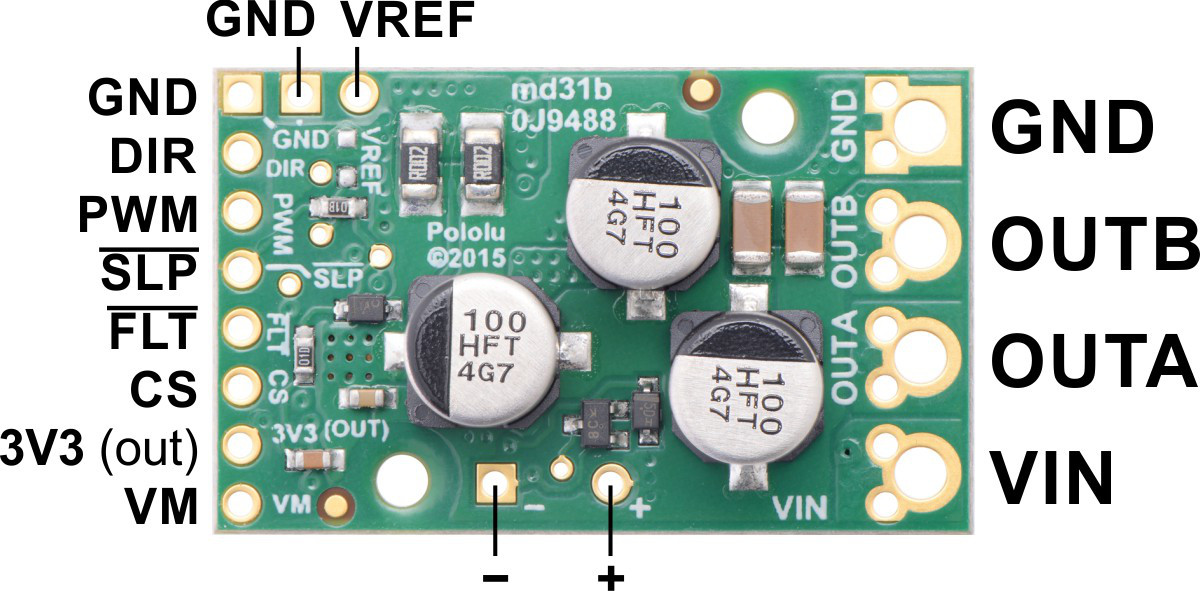
Für den korrekten Betrieb des Moduls müssen die Motoren zwischen den Pins VIN und GND versorgt und die für die Motorbewegung verantwortlichen Pins angeschlossen werden, deren Beschreibung in der folgenden Tabelle enthalten ist.
| STIFT | Beschreibung |
|---|---|
| Fahrgestellnummer | Die Versorgungsspannung der Motoren reicht von 6,5 V bis 40 V |
| VM | Leistungsausgang mit Verpolungsschutz. |
| +/- | Stift zum Anlöten eines zusätzlichen Kondensators an den Motorstromleitungen. |
| 3V3 (AUS) | Die Ausgangsspannung des Spannungsreglers beträgt 3,3 V bei einer Stromausbeute von wenigen mA. Sie kann als Referenzspannung für andere Schaltungen verwendet werden. Achten Sie besonders darauf, die benachbarten Pins nicht kurzzuschließen. |
| Masse | Die Masse des Systems |
|
AUSA AUSB |
Ausgänge zum Anschluss eines Gleichstrommotors. |
| PWM | Geschwindigkeitssteuereingang für PWM-Signalanschluss. Standardmäßig niedrig |
| DIR | Digitaleingang zur Steuerung der Drehrichtung des Motors. Standardmäßig niedrig. |
| SLP | Das Eintreten in den Low-Zustand bewirkt, dass das System in den Standby-Modus wechselt. Standardmäßig befindet sich der Ausgang im High-Zustand – das System ist eingeschaltet. |
| FLT | Open-Drain-Ausgang, der über einen Fehler informiert. Das Auftreten eines niedrigen Zustands weist auf einen Systemfehler hin. |
| CS | Stromsensorausgang mit einer Auflösung von 20 mV / A mit einem Offset von 50 mA. |
| VREF | Referenzspannungseingang. Schließen Sie einen Widerstand an Masse an, um den maximalen Ausgangsstrom zu begrenzen. Ohne zusätzlichen Widerstand beträgt der Maximalwert 50 A. |
Die Tabelle zeigt die Abhängigkeiten der Ausgänge von den Eingangssignalen:
H - hoher Zustand
L - niedriger Zustand
X - irrelevant
|
PWM |
DIR |
AUSA | AUSB | Der Zustand des Motors |
|---|---|---|---|---|
|
% |
H. | H. | L. |
Der Motor dreht im Uhrzeigersinn mit % PWM-Geschwindigkeit. |
|
% |
L. | L. | H. |
Der Motor dreht mit % PWM-Geschwindigkeit gegen den Uhrzeigersinn |
|
L. |
X | L. | L. | Bremsen. |
Die Frequenz des PWM-Signals sollte bis zu 100 kHz betragen, typischerweise werden 20 kHz verwendet. Die Drehzahl ist proportional zum Tastverhältnis des PWM-Signals. Darüber hinaus verfügt das System über einen VREF-Pin, mit dem Sie den fließenden Strom begrenzen können. Standardmäßig ist der Wert auf 50 A begrenzt, bei Änderungen muss ein Widerstand zwischen VREF und Masse geschaltet werden. Die Widerstandsabhängigkeit ist im Diagramm dargestellt.
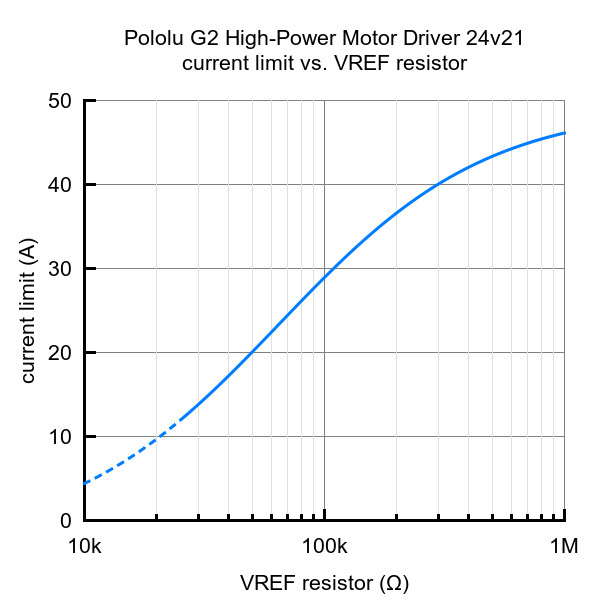
Der Motorstrom hängt von dem Widerstand ab, der zwischen dem VREF-Pin und Masse angeschlossen ist.
Der Controller kann verschiedene Fehler erkennen, die durch Setzen des FLT-Pins auf den niedrigen Zustand signalisiert werden. Um es zu verwenden, muss es mit dem High-Zustand (Systemlogikspannung) verbunden werden. Ein Kurzschluss an den Ausgängen, zu niedrige Spannung und Überhitzung können erkannt werden. Alle Fehler schalten die Motorausgänge ab, sperren sie jedoch nicht, was bedeutet, dass die Steuerung versucht, den Betrieb wieder aufzunehmen, wenn der Fehler behoben ist.
Der Controller kann kurzzeitig große Stromstöße verarbeiten (100 A für einige Millisekunden). Im Dauerbetrieb verträgt er 21 A, dies hängt jedoch von äußeren Bedingungen wie Umgebungstemperatur und Motorkühlung ab. Ein Kühlkörper kann der Platine hinzugefügt werden, um die Leistung zu verbessern.
Der Regler hat keine automatische Abschaltung bei Überhitzung. Es sollte darauf geachtet werden, Schäden am System zu vermeiden.
Video, das den Betrieb der H-Brücke beschreibt - Treiber von Gleichstrommotoren.
| Name |
Spannung Energie |
Strom kontinuierlich |
|---|---|---|
| G2 High-Power 18v25 | 30 V | 25 A. |
| G2 High-Power 18v17 | 30 V | 17 A. |
| G2 High-Power 24v21 | 40 V | 21A. |
| G2 High-Power 24v13 | 40 V | 13 A. |
Nützliche Links |
| Stromspannung aus | 6,5 V |
| Stromspannung Nieder | 40,0 V |
| Aktuelle Effizienz | 21,0 A |
| Anzahl der Kanäle | 1 |
| PAKETBREITE | 8 cm |
| PAKETHÖHE | 1 cm |
| PAKETTIEFE | 10 cm |
| PAKETGEWICHT | 0.01 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!
Herkunftsland: der Vereinigten Staaten
Hersteller-Kontaktdaten: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin










