










































































































































































































Schrittmotor- Treibermodul basierend auf dem DRV8434S-Chip von Texas Instruments. Es wird mit einer Spannung im Bereich von 4,5 V bis 48 V betrieben. Es bietet eine breite Palette von Schrittauflösungen - von Vollschritt bis 1/256 Schritt . Diese Version des Boards verwendet ein eingebautes Potentiometer , um die maximale Strombegrenzung einzustellen, und die SPI-Schnittstelle kann verwendet werden, um die tatsächliche Strombegrenzung auf einen von 16 gleich beabstandeten Werten von 125 mA bis 2 A einzustellen . Das Modul ist gegen Überhitzung, Kurzschluss und Überschreiten des Maximalstroms geschützt.
Unser Angebot umfasst auch Treiber für Schrittmotoren mit anderen Betriebsparametern.
 Das Set enthält einen Goldnadelstreifen.
Das Set enthält einen Goldnadelstreifen.
DRV8434S Schrittmotortreiber 48 V / 2 A SPI mit Potentiometer.
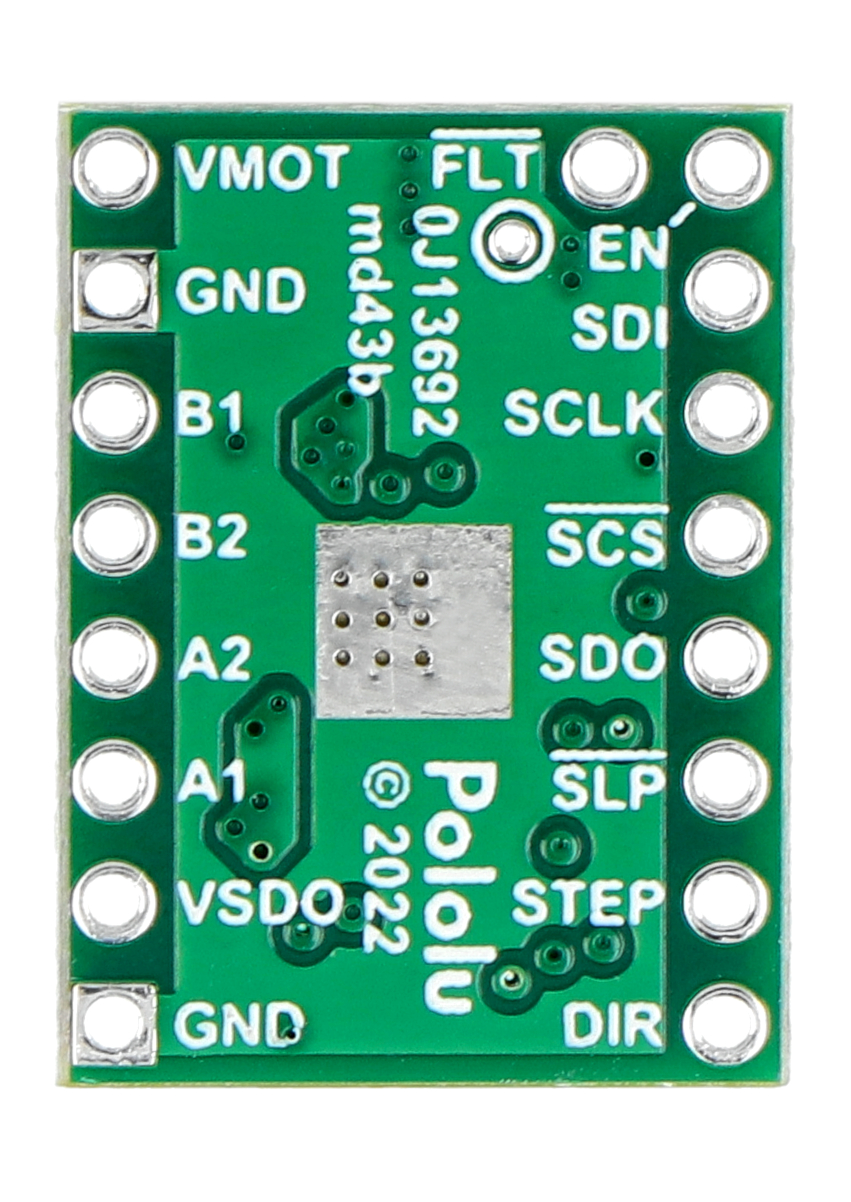
Der Controller benötigt eine Motorversorgungsspannung von 4,5 V bis 48 V, die über VIN und GND verbunden werden muss. Beachten Sie, dass Versorgungsspannungen unter 6 V die maximal einstellbare Stromgrenze begrenzen. Der VSDO-Pin muss auch mit der gewünschten SPI-Logikspannung versorgt werden. Die DRV8434S SPI-Schnittstelle ist mit 1,8-V-, 3,3-V- und 5-V-Systemen kompatibel.
Ein an den STEP-Pin gegebener Impuls entspricht einem Schritt des Schrittmotors in der an den DIR-Pin gegebenen Richtung. Die STEP- und DIR-Pins werden intern auf Masse (GND) gezogen. Wenn sich der Motor also nur in eine Richtung drehen soll, kann DIR unbeschaltet bleiben.
Das Gerät verfügt über zwei verschiedene Eingänge zur Steuerung der Leistungszustände: SLEEP (SLP) und ENABLE. SLP ist über einen 10k-Pullup-Widerstand mit VSDO verbunden und ENABLE wird intern vom Treiber hochgezogen. Die Pins können getrennt bleiben oder dynamisch gesteuert werden, indem sie mit dem digitalen Ausgang der MCU verbunden werden.
Der DRV8434S hat auch einen FAULT (FLT)-Ausgang. Es geht auf Low, wenn es eine Anomalie im Systembetrieb feststellt. FAULT wird auf VSDO hochgezogen, sodass kein externer Pullup-Widerstand benötigt wird.
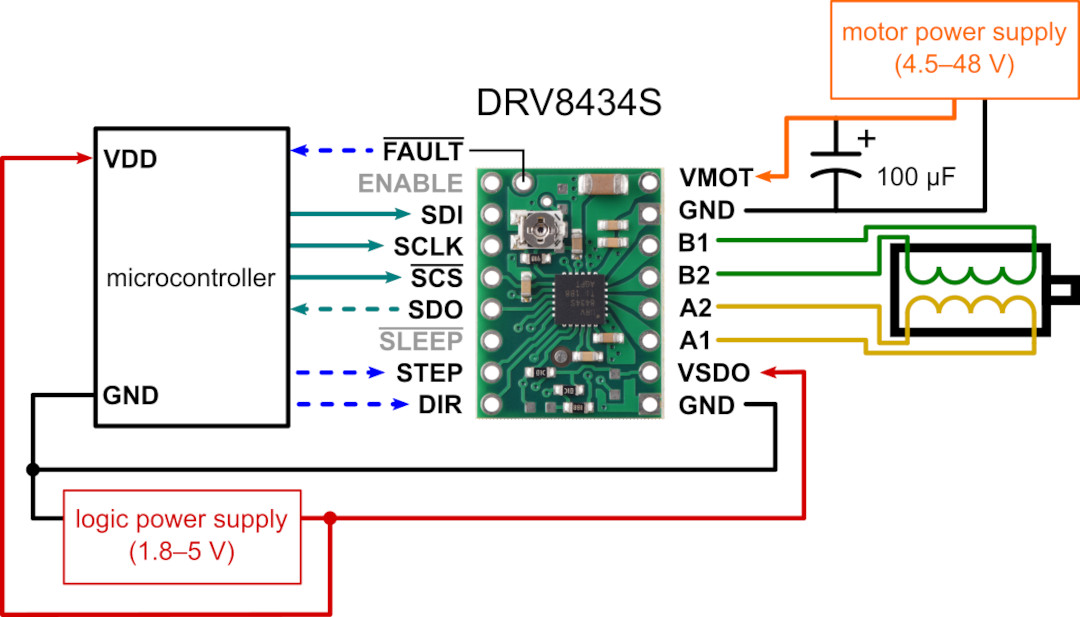
Ein Beispiel für den Anschluss des Mikrocontrollers an den DRV8434S-Controller.
Um hohe Schrittgeschwindigkeiten zu erreichen, ist die Motorleistung typischerweise höher als ohne aktive Strombegrenzung akzeptabel wäre. Beispielsweise könnte ein typischer Schrittmotor einen maximalen Nennstrom von 1 A bei einem Spulenwiderstand von 5 Ω haben, was eine maximale Stromversorgung des Motors von 5 V anzeigen würde.Die Verwendung eines solchen Motors bei 9 V würde höhere Schrittgeschwindigkeiten ermöglichen, aber den Strom muss auf weniger als 1 A begrenzt werden, um Motorschäden zu vermeiden.
Bei dieser Version ist die maximale Strombegrenzung auf 2 A festgelegt, und der SPI kann verwendet werden, um die tatsächliche Strombegrenzung auf einen von 16 gleichmäßig verteilten Werten von 125 mA bis 2 A einzustellen.
Eine andere Möglichkeit besteht darin, die Spannung am VREF-Pin zu messen und die Stromgrenze zu berechnen. Die Stromgrenze kann aus der Formel berechnet werden:
Stromgrenze = VREF/ 1,32
oder
Effektive Stromgrenze = VREF⋅TRQ_DAC_%/1,32
Das Modul basiert auf dem DRV8434S-System von Texas Instruments.
| PAKETBREITE | 8 cm |
| PAKETHÖHE | 9 cm |
| PAKETTIEFE | 1 cm |
| PAKETGEWICHT | 0.003 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!

Herkunftsland: der Vereinigten Staaten
Hersteller-Kontaktdaten: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin






