
















































































































































































































































































































- Neu






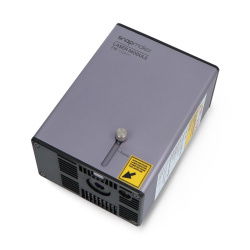
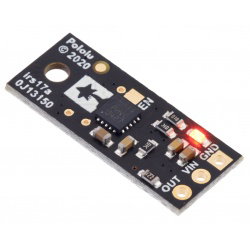
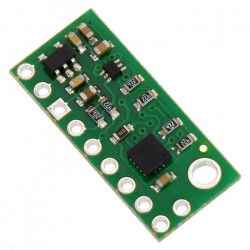
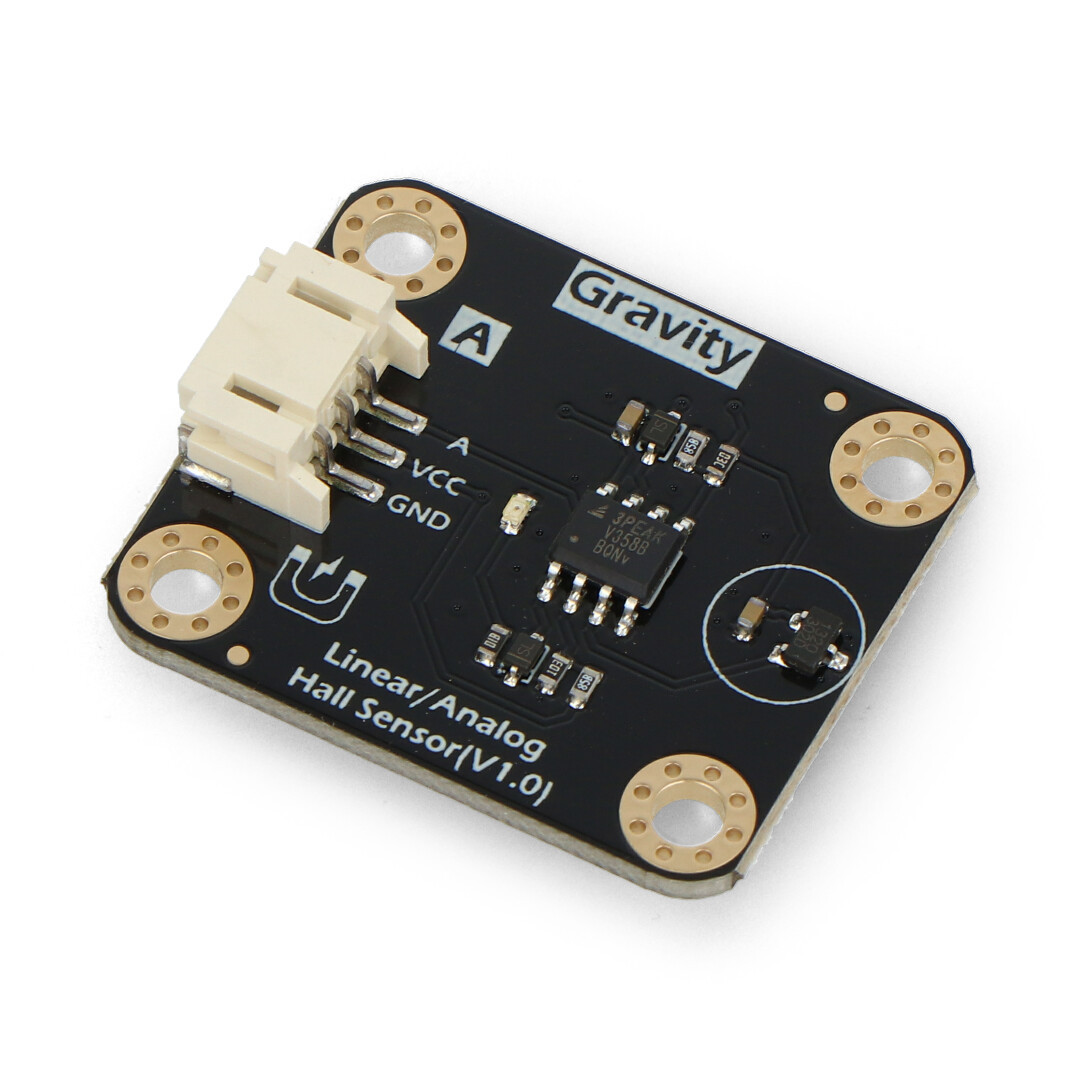
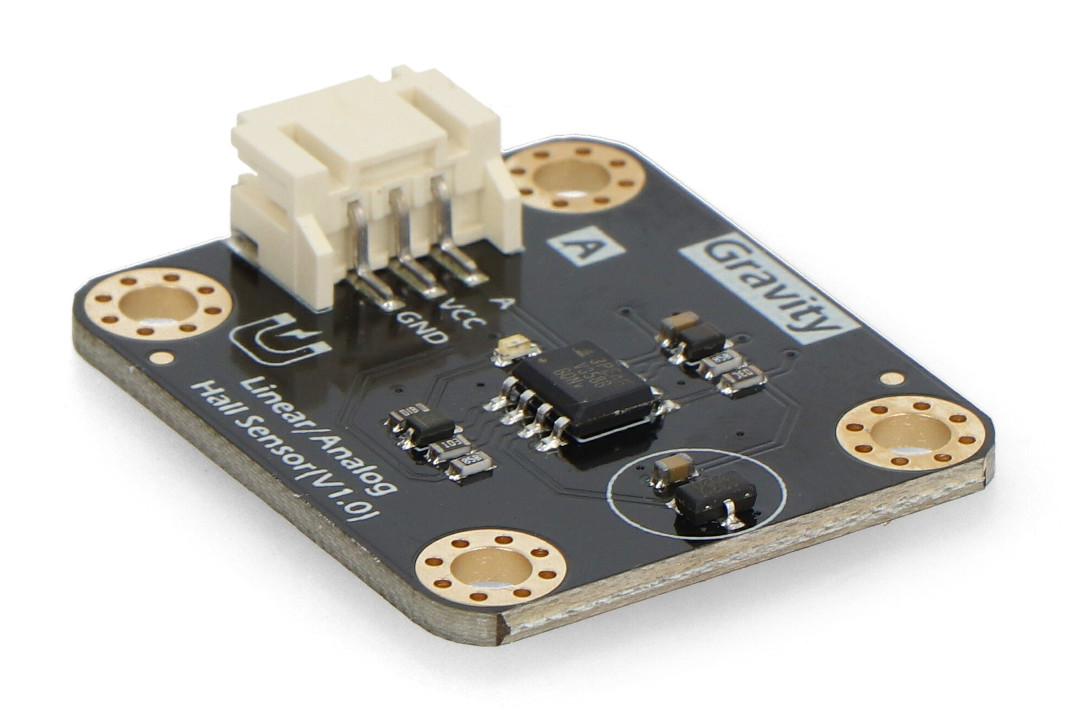
Das DFRobot Gravity Hall-Sensormodul ist für die Messung und Überwachung der Magnetfeldstärke konzipiert. Es ist mit 3 analogen Pins und einer LED-Anzeige ausgestattet, um das erkannte Magnetfeld anzuzeigen. Es wird mit 3,3 V bis 5 V versorgt , sein Versorgungsstrom reicht von 4,2 mA bis 8 mA. Er weist einen niedrigen Rauschpegel auf, so dass nur minimale Störungen möglich sind. Er lässt sich mit Controllern wie Arduino, Micro:bit und UNIHAKERund eignet sich damit zum Beispiel für die Positions- und Geschwindigkeitserkennung in der Robotik oder in Sicherheitssystemen.
Kompatibel mit Arduino Der Hersteller hat ein ausführlichesBenutzerhandbuch erstellt, das eine Beschreibung von Projekten mit dem Sensor und einen Beispielprogrammcode enthält.
DFRobot Gravity - linearer / analoger Magnetfeld-Hallsensor - DFR1132.
DFRobot Gravity-Modul mit Hall-Sensor.
Der Sensor funktioniert mit einem Mikrocontroller, der mit Analogeingängen ausgestattet ist(Arduino, Micro:bit, UNIHIKER). Um den Betrieb zu beginnen, schließen Sie an:
Nach dem Anschluss erzeugt der Sensor ein analoges Signal, das proportional zur Stärke des detektierten Magnetfelds ist. Dies ermöglicht eine genaue Überwachung von Feldänderungen und die Verarbeitung der Ergebnisse in elektronischen Projekten.
 Kompatibel mit Arduino, Micro:bit und UNIHAKER.
Kompatibel mit Arduino, Micro:bit und UNIHAKER.
Das fortschrittliche Board von DFRobot Gravity DFR1132 verfügt über Schaltungen im Kern, die die magnetische Induktionskraft direkt in eine Ausgangsspannung umwandeln. Dank der hohen Genauigkeit kann der Sensor für viele Lösungen eingesetzt werden, die eine präzise Magnetfelderfassung erfordern. Dazu gehören industrielle Kontrollprojekte, Arbeiten für die wissenschaftliche Forschung, Sicherheitssysteme und verschiedene Projekte mit elektronischen Geräten. Der Sensor reagiert auf Magnetfelder, wenn:

Inhalt des Kits.
Nützliche Links |
| Stromspannung aus | 3,3 V. |
| Stromspannung Nieder | 5,0 V |
| PAKETBREITE | 5.7 cm |
| PAKETHÖHE | 6.2 cm |
| PAKETTIEFE | 2.7 cm |
| PAKETGEWICHT | 0.012 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!






