




























































































































































































































































































Schrittmotortreiber basierend auf dem A4988 -System. Es wird mit einer Spannung im Bereich von 8 - 35 V betrieben, mit einer maximalen Stromaufnahme von 2 A pro Spule. Maximale Auflösung: 1/16 Schritt. Das Modul erlaubt den Stromfluss bis 1 A ohne Kühlkörper.
Das System ermöglicht es Ihnen, einen Schrittmotor mit einem Gerät zu steuern, mit dem Sie logische Zustände erzeugen können, wie z. B. Arduino , STM32Discovery , Raspberry Pi oder einen beliebigen Mikrocontroller . Das Pololu-Modul ist sehr einfach zu bedienen. Um den Motor um einen Schritt zu drehen, geben Sie den High-Zustand am STEP-Pin (logische Eins) ein, die nächste Folge von Nullen und Einsen bewegt den Motor um einen Schritt usw. (High-Zustand - im Gegenteil). Die Steuerung hat auch die Möglichkeit, die Auflösung des Motorbetriebs auszuwählen. A4988 Schrittregler - Arduino und Raspberry Pi ist die perfekte Kombination zur Steuerung eines Schrittmotors.
Um einen bipolaren Schrittmotor zu steuern, schließen Sie das System wie in der folgenden Abbildung gezeigt an. Wenn Sie einen unipolaren Motor ansteuern, lesen Sie bitte das Handbuch . Ist die Nennspannung des Motors kleiner als die erforderliche Reglerversorgung (8 V), muss die Stromgrenze manuell über das Potentiometer eingestellt werden.

A. Logikleistung, B. Motorleistung, C. Mikrocontroller.
Die Abbildung zeigt den Mindestanschluss des Controllers. Der RESET-Pin ist standardmäßig nicht verbunden, um das System zu starten, muss er hoch gesetzt werden. Dies kann durch Verbinden mit dem benachbarten SLEEP-Pin erfolgen.
Zur Versorgung des Logikteils des Moduls wird eine Spannung im Bereich von 3 V bis 5,5 V benötigt, die an den Pin angeschlossen werden sollte VDD . Dem Pin wird die Motorversorgungsspannung im Bereich von 8 V bis 35 V zugeführt VMOT . Das System kann Motoren mit einer Nennspannung kleiner als die erforderlichen 8 V ansteuern. Dazu sollte die maximale Stromaufnahme durch das Potentiometer begrenzt werden, um den zulässigen Motorstrom nicht zu überschreiten. Beispiel: Bei einem Motor mit einem Widerstand von 5 Ω pro Spule und einer Stromaufnahme von 1 A beträgt die Nennversorgungsspannung 5 V. Bei einer Versorgung mit 12 V sollte der Strom so begrenzt werden, dass er 1 A nicht überschreitet.
Ein an den STEP-Pin gegebener Impuls bewirkt einen Schritt des Motors in die gewählte Richtung, indem der DIR-Pin den entsprechenden logischen Zustand erhält. Die STEP- und DIR-Pins werden intern nicht hochgezogen. Soll der Motor nur in eine Richtung drehen, kann der DIR-Pin fest mit VCC oder GND verbunden werden.
Das System verfügt über drei weitere Eingänge zur Steuerung des Stromverbrauchs: RESET SLP und EN - ihre Beschreibung finden Sie in der Dokumentation . Beachten Sie, dass der RESET-Pin für nichts verstaut ist. Wenn es nicht verwendet wird, kann es mit dem benachbarten SLEEP-Pin verbunden werden.
Die Platine ist so ausgelegt, dass sie bei einer Stromaufnahme von ca. 1A pro Spule Wärme abführen kann. Wenn der Strom viel höher ist, sollte ein externer Kühlkörper verwendet werden für die Montage können Sie Wärmeleitkleber verwenden.
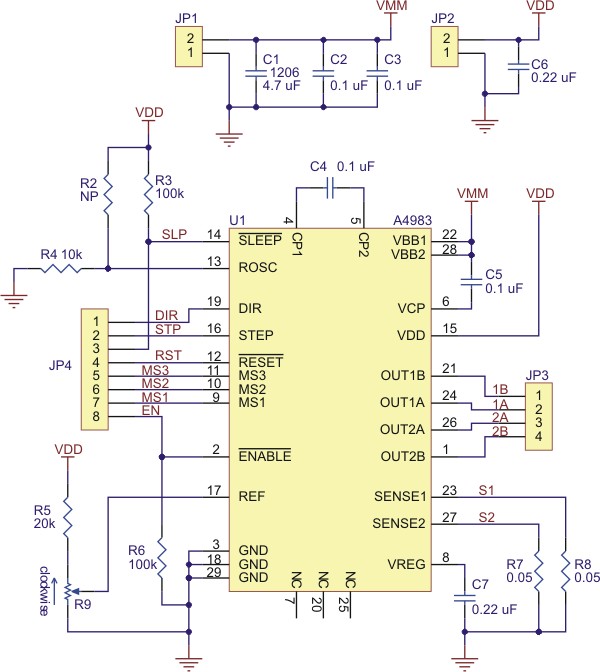
Das System enthält die notwendigen passiven Komponenten für den korrekten Betrieb des Controllers . Das Anschlussschema ist rechts dargestellt.
|
Warnung! Das Anschließen und Trennen des Motors bei eingeschalteter Steuerung kann das System beschädigen. |
Die Schrittweite wird durch die Eingänge MS1 , MS2 , MS3 gewählt . Die möglichen Einstellungen sind in der folgenden Tabelle aufgeführt. Die Eingänge MS1, MS2 und MS3 haben einen internen Pull-Down-Widerstand (100 kOhm).
| MS1 | MS2 | MS3 | Auflösung |
| niedrig | niedrig | niedrig | Voller Schritt |
| hoch | niedrig | niedrig | 1/2 Schritt |
| niedrig | hoch | niedrig | 1/4 Schritt |
| hoch | hoch | niedrig | 1/8 Schritt |
| hoch | hoch | hoch | 1/16 Schritt |
Das System kann Motoren mit einer Nennspannung kleiner als die erforderlichen 8 V ansteuern. Dazu sollte die maximale Stromaufnahme durch das Potentiometer begrenzt werden, um den zulässigen Motorstrom nicht zu überschreiten. Beispiel: Bei einem Motor mit einem Widerstand von 5 Ω pro Spule und einer Stromaufnahme von 1 A beträgt die Nennversorgungsspannung 5 V. Bei einer Versorgung mit 12 V sollte der Strom so begrenzt werden, dass er 1 A nicht überschreitet.
Der Schrittregler A4988 ermöglicht eine aktive Strombegrenzung mit einem Potentiometer. Eine Möglichkeit, eine Begrenzung einzuführen, besteht darin, den Controller in den Vollschrittmodus zu versetzen und den durch eine Spule fließenden Strom zu messen, ohne ein Signal an den STEP-Eingang anzulegen. Der gemessene Strom beträgt 70 % des eingestellten Grenzwerts (beide Spulen sind immer eingeschaltet und im Vollschrittmodus auf 70 % begrenzt). Eine andere Möglichkeit besteht darin, die Spannung am REF-Pin (auf der Platine mit einem Kreis markiert) zu messen und die Stromgrenze zu berechnen (Messwiderstände haben einen Wert von 0,05 Ω). Näheres in der Dokumentation zum A4988 Chip .
| Niebezpieczne | Komponente |
| PAKETBREITE | 7.5 cm |
| PAKETHÖHE | 0.5 cm |
| PAKETTIEFE | 9 cm |
| PAKETGEWICHT | 0.003 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!

Produktinformation
Das Produkt ist eine Komponente, die für die weitere Montage/den Prototypenbau bestimmt ist. Es stellt kein eigenständiges fertiges Produkt im Sinne der Vorschriften über die Produktsicherheit dar.
Dane GPSR
Herkunftsland: der Vereinigten Staaten
Hersteller-Kontaktdaten: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin




