



















































































































































































































Modul mit zweikanaligem Treiber für MAX14870 -Motoren, der mit Spannungen von 4,5 V bis 36 V und Strömen bis zu 1,7 A pro Kanal (max. 2,5 A) arbeitet. Das System kann direkt an die Arduino-Anschlüsse angeschlossen werden. Modul zur Selbstmontage.
Das Modul basiert auf zwei MAX14870-Systemen, mit denen Sie Motoren mit einer Versorgungsspannung von bis zu 36 V und einer Dauerstromaufnahme von 1,7 A steuern können. Der Controller hält auch Stromspitzen bis zu 2,5 A für einige Sekunden stand. Die Drehzahl kann über das PWM -Signal gesteuert werden.

In Verbindung mit dem Arduino können Sie unter Verwendung einer speziell vorbereiteten Bibliothek die Geschwindigkeit und Drehrichtung von zwei Gleichstrommotoren einfach steuern. Die Form und die Ausgänge der Platine ermöglichen eine direkte Verbindung mit dem Minicomputer, wie in den Figuren gezeigt. Die Schaltung verwendet 16 Pins.
|
Das Produkt ist mit Arduino kompatibel Der Hersteller stellt Arduino-Anwendern eine Bibliothek zur Verfügung . |

MAX14870 - Zweikanaltreiber für 28 V / 1,7 A Motoren .
Die folgende Tabelle zeigt, welche Arduino-Pins vom Motortreiber verwendet werden:
|
RPi-Pin GPIO |
Stift Treiber |
Beschreibung |
|---|---|---|
| 4 | DE |
Standardmäßig bedeutet der Low-Zustand getrennte Motorausgänge. Um den Treiber zu starten, sollte der High-Status gegeben sein. |
| 12 | FEHLER |
Fehlerausgabe. Standard im hohen Zustand. Zeigt einen zu hohen Strom oder eine zu hohe Temperatur an. |
| 9 | PWM-Motor 1 |
PWM-Eingang zur Steuerung der Motordrehzahl. Die maximale PWM-Frequenz beträgt 50 kHz. |
| 10 | PWM-Motor 2 |
PWM-Eingang zur Steuerung der Motordrehzahl. Die maximale PWM-Frequenz beträgt 50 kHz. |
| 7 | Motor 1 RICHT |
Stift zur Auswahl der Drehrichtung. Im Low-Zustand fließt der Strom vom Ausgang A nach B. Im High-Zustand - von B nach A. |
| 8 | Motor 2 RICHT | Stift zur Auswahl der Drehrichtung. Im Low-Zustand fließt der Strom vom Ausgang A nach B. Im High-Zustand - von B nach A. |
Die Tabelle zeigt die Betriebsarten in Abhängigkeit der Eingänge:
| DE | DIR | PWM | MxA | MxB | Betriebsart |
|---|---|---|---|---|---|
| 0 | 0 | PWM | PWM (H/L) | L. | Vorwärtsdrehung mit angegebener PWM%-Geschwindigkeit. |
| 0 | 1 | PWM | L. | PWM (H/L) | Rückwärtsdrehung mit angegebener PWM%-Geschwindigkeit. |
| 1 | x | 0 | L. |
L. |
Bremsen (Ausgänge mit Masse verbunden). |
| 1 | x | x | AUS | AUS | Deaktivierte Ausgänge. |
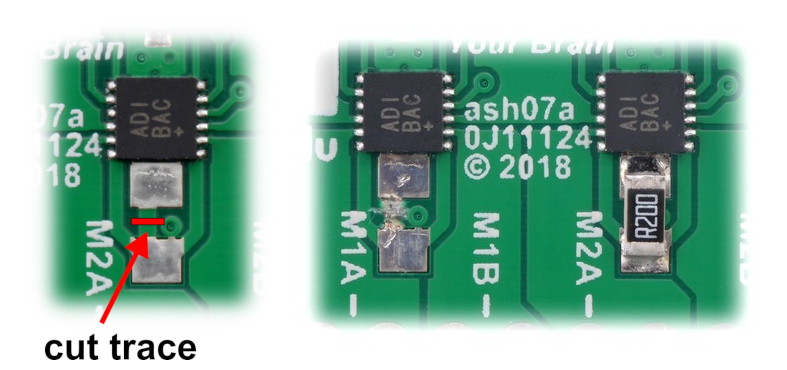
Der MAX14870 verfügt über einen SNS-Eingang, der als automatischer Strombegrenzer verwendet werden kann. Standardmäßig ist es für beide Chips mit GND verbunden. Um die Begrenzung zu aktivieren, unterbrechen Sie zuerst den Pfad zwischen den Pins der Widerstände 1206. Verbinden Sie dann den entsprechenden Widerstand 1206 mit diesen Pins.
Mit dem Gerät können Sie den Minicomputer selbst aus der Eingangsspannung des Moduls mit Strom versorgen. Schließen Sie die Stromversorgung nicht an das Arduino an, da dies die Platine beschädigen kann. Wenn die Eingangsspannung zu den Motoren für den Arduino geeignet ist, löten Sie den AVIN = VM "Jumper und verwenden Sie die blauen Schraubverbinder, um die Stromversorgung vom Arduino fernzuhalten. Da die Platine mit einer viel höheren Spannung als der Mikrocontroller betrieben werden kann, Es ist sehr wichtig, diesen Jumper nur bei gleicher Spannung von Motoren und Arduino zu verwenden. Wenn die Spannung höher ist, empfehlen wir die Verwendung des D24V10F5-Konverters - dafür wurden spezielle Löcher vorbereitet.

Nützliche Links |
| Stromspannung aus | 5,0 V |
| Stromspannung Nieder | 28,0 V |
| Aktuelle Effizienz | 1,7 A |
| PAKETBREITE | 8.5 cm |
| PAKETHÖHE | 0.8 cm |
| PAKETTIEFE | 7.5 cm |
| PAKETGEWICHT | 0.012 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!
Herkunftsland: der Vereinigten Staaten
Hersteller-Kontaktdaten: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin
























