





























































































































































































































































































Einkanal- DC-Motortreiber. Dauerstrom pro Kanal 2,6 A (kurzzeitig bis 5 A). Versorgungsspannung von 4,5 V bis 28 V.
Das auf dem TB9051FTG -System basierende Modul ermöglicht die Steuerung eines Gleichstrommotors. Der Motor kann mit einer Spannung von 4,5 V bis 28 V mit einer Dauerstromaufnahme von bis zu 2,6 A, kurzzeitig (für einige Sekunden) bis zu 5 A versorgt werden. Wir empfehlen Ihnen, vor der Verwendung die Dokumentation des zu lesen TB9051FTG -System.
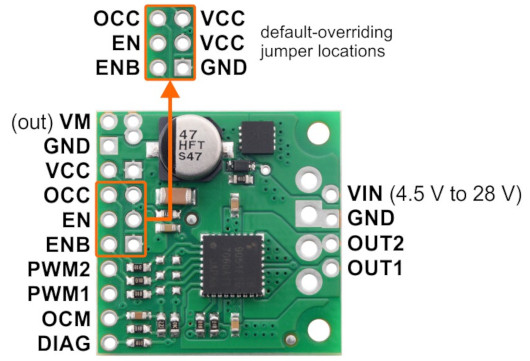
| STIFT | Beschreibung |
|---|---|
| Vin | Die Motorversorgungsspannung reicht von 4,5 V bis 28 V. Es verfügt über einen Schutz gegen Polaritätswechsel der Versorgungsspannung. |
| Masse | Massepotential des Systems. |
| VM | Ausgang für den Zugang zur Motorstromversorgung nach Verpolungsschutz. Sie können verwendet werden, um andere Systemkomponenten mit Strom zu versorgen. |
| AUS1 | Ausgänge - zum Anschluss der Motorklemmen. |
| AUS2 | Ausgänge - zum Anschluss der Motorklemmen. |
| VCC | Logikspannung - 5 V. |
| OCC | Bei Überstrom wird der Regler abgeschaltet. Standardmäßig niedrig. Wenn es hoch ist, versuche ich automatisch, die Arbeit nach einer kurzen Verzögerung wieder aufzunehmen. |
| DE | Wenn es niedrig ist, werden OUT1 und OUT2 auf hohe Impedanz eingestellt. Invertiert Invertierte PWM kann an diesen Pin angelegt werden (wenn EN hoch ist und PWM1 oder PWM2 hoch ist) Standard ist niedrig. |
| ENB | Wenn es hoch ist, werden OUT1 und OUT2 auf hohe Impedanz eingestellt . PWM kann an diesen Pin angelegt werden (wenn ENB niedrig ist und PWM1 oder PWM2 hoch ist).Standard ist hoch . |
| PWM1 | Steuereingang für OUT1. Standard niedrig. |
| PWM2 | Steuereingang für OUT2. Standard niedrig. |
| OCM | Der Stromüberwachungsausgang Pin liefert eine analoge Rückkopplungsspannung von ca. 500 mV pro Verstärker. |
| DIAG | Fehlerdiagnoseausgabe. geht auf Low, wenn Fehler auftreten oder der Controller durch EN oder ENB ausgeschaltet wird. |
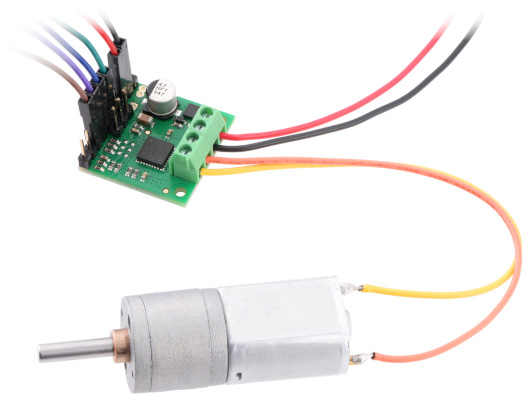
Tabelle für PWM1 + PWM2-Modus | ||||||
| Eintrag | Ausgang | Betriebsart | ||||
| DE | ENB | PWM1 | PWM2 | AUS1 | AUS2 | |
| 1 | 0 | PWM | 0 | PWM (H/L) | L. | Vorwärtsdrehung / Bremsung bei angegebener Geschwindigkeit: PWM% |
| 1 | 0 | 0 | PWM | L. | PWM (H/L) | Rückwärtslauf / Bremsen bei angegebener Geschwindigkeit: PWM% |
| 1 | 0 | 0 | 0 | L. | L. | Stopp, Ausgänge mit Masse verbunden |
| 1 | 0 | 1 | 1 | L. | L. | |
| 0 | X | X | X | AUS | AUS | Freilaufender Ausgang getrennt |
| X | 1 | X | X | AUS | AUS | |
Tabelle für PWM1 + PWM2 + EN-Modus | ||||||
| Eintrag | Ausgang | Betriebsart | ||||
| DE | ENB | PWM1 | PWM2 | AUS1 | AUS2 | |
| PWM | 0 | 1 | 0 | PWM (H/Z) | PWM (L/Z) | Vorwärtsrotation / Freilauf bei angegebener Geschwindigkeit: PWM% |
| 0 | 1 | PWM (L/Z) | PWM (H/Z) | Rückwärtslauf / Freilauf bei angegebener Geschwindigkeit: PWM% | ||
| 0 | X | X | X | AUS | AUS | Freilaufender Ausgang getrennt |
| X | 1 | X | X | AUS | AUS | |
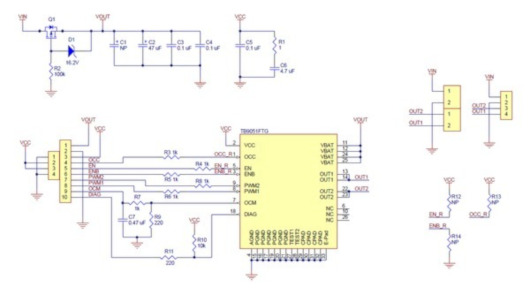
Das System umfasst einen Treiber und notwendige passive Elemente für seinen korrekten Betrieb. Das elektronische Schaltbild ist in der folgenden Abbildung verfügbar.
Nützliche Links |
| Stromspannung aus | 4,5 V. |
| Stromspannung Nieder | 28,0 V |
| Aktuelle Effizienz | 2,5A. |
| Anzahl der Kanäle | 1 |
| Niebezpieczne | Komponente |
| PAKETBREITE | 8.5 cm |
| PAKETHÖHE | 0.6 cm |
| PAKETTIEFE | 11 cm |
| PAKETGEWICHT | 0.007 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!
Produktinformation
Das Produkt ist eine Komponente, die für die weitere Montage/den Prototypenbau bestimmt ist. Es stellt kein eigenständiges fertiges Produkt im Sinne der Vorschriften über die Produktsicherheit dar.
Dane GPSR
Herkunftsland: der Vereinigten Staaten
Hersteller-Kontaktdaten: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin




