




























































































































































































































































































Pololu-Modul mit einem zweikanaligen Treiber für Gleichstrommotoren. Es wird mit der Spannung von 4,5 V bis 13,5 V versorgt. Der Dauerstrom pro Kanal beträgt 1 A, bei Anschluss beider Kanäle erhöht sich der Wert auf 2 A.
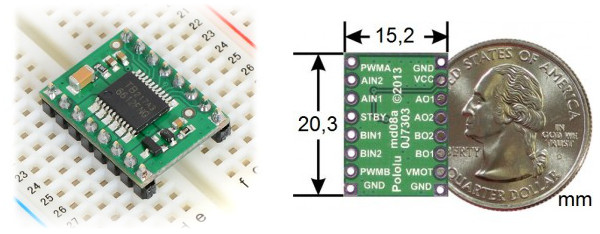
Die TB6612FNG H-Brücke ist eine effiziente Motorsteuerung in einem kleinen SSOP24-Gehäuse. Die Firma Pololu hat die Erwartungen der Benutzer erfüllt und ein Modul entwickelt, das den TB6612FNG -Chip und passive Komponenten enthält, die für den ordnungsgemäßen Betrieb erforderlich sind. Die Signale wurden auf herkömmliche Pins (2,54 mm Raster) herausgeführt. Das Modul kann in das Steckbrett gesteckt oder über Kabel angeschlossen werden.
| Für Arduino-Anwender steht eine Bibliothek zur Verfügung, die die Bedienung des Moduls erleichtert. |
| Stift | Beschreibung |
|---|---|
| VCC | Stromversorgung des logischen Teils |
| VMOT | Antrieb der Motoren |
| Masse | Masse |
| AO1 AO2 | Ausgang Kanal A |
| BO1 BO2 | Ausgang Kanal B |
| PWMA | Kanal A PWM-Signal |
| PWMB | Kanal B PWM-Signal |
| STBY | Sie müssen zu VCC hochziehen, um das System einzuschalten, der niedrige Zustand (Standard) versetzt das System in den Schlafmodus (geringer Stromverbrauch) |
| AIN1, AIN2 | Richtungssteuerung von Kanal A |
| BIN1, BIN2 | Steuerung der Richtung von Kanal B |
Alle Logiksignale werden intern auf Masse gezogen. Die maximale PWM-Frequenz beträgt 100 kHz.
|
AIN1 |
AIN2 |
PWMA PWMB |
Ausgänge Motoren |
|---|---|---|---|
|
Zustand |
Zustand niedrig |
% füllen (nicht null) |
Der Motor dreht mit seiner durch pwm (ungleich 0) vorgegebenen Maximaldrehzahl im Uhrzeigersinn. |
| Zustand niedrig |
Zustand hoch |
% füllen (nicht null) |
Der Motor dreht mit der per PWM eingestellten Maximaldrehzahl (nicht 0) gegen den Uhrzeigersinn. |
| Zustand niedrig |
Zustand niedrig |
ohne Bedeutung |
freies Bremsen (sanfter Stopp) |
| Zustand hoch |
Zustand hoch |
ohne |
freies Bremsen (sanfter Stopp) |
| ohne Bedeutung |
ohne Bedeutung |
niedriger Zustand 0% Füllung |
Plötzliches Bremsen |
Video, das den Betrieb der H-Brücke beschreibt - Treiber von Gleichstrommotoren.
Das TB6612-System kann als Steuerung für Pololu-Mikromotoren verwendet werden. Wenn die Motoren abgewürgt werden sollen, wird empfohlen, die Kanäle für eine höhere Stromausbeute zusammenzuführen. Verbinden Sie dazu folgende Ausgänge:
Diagramm
Das Modul enthält eine gelötete Brücke mit Goldpin-Anschlüssen mit einem Standardraster von 2,54 mm. Auf der Platine befinden sich auch Filterkondensatoren, was bedeutet, dass für den ordnungsgemäßen Betrieb des Systems eine entsprechende Verbindung mit dem Mikrocontroller ausreicht. Das Diagramm ist unter dieser Adresse erhältlich.
Das Angebot umfasst auch andere Motorsteuerungen , darunter ein separates TB6612 -System.
Nützliche Links |
| Stromspannung aus | 4,5 V. |
| Stromspannung Nieder | 13,5 V |
| Aktuelle Effizienz | 1,0 A |
| Anzahl der Kanäle | 2 |
| Niebezpieczne | Komponente |
| PAKETBREITE | 7.5 cm |
| PAKETHÖHE | 0.5 cm |
| PAKETTIEFE | 8.5 cm |
| PAKETGEWICHT | 0.003 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!

Produktinformation
Das Produkt ist eine Komponente, die für die weitere Montage/den Prototypenbau bestimmt ist. Es stellt kein eigenständiges fertiges Produkt im Sinne der Vorschriften über die Produktsicherheit dar.
Dane GPSR
Herkunftsland: der Vereinigten Staaten
Hersteller-Kontaktdaten: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin


")








