






























































































































































































































































































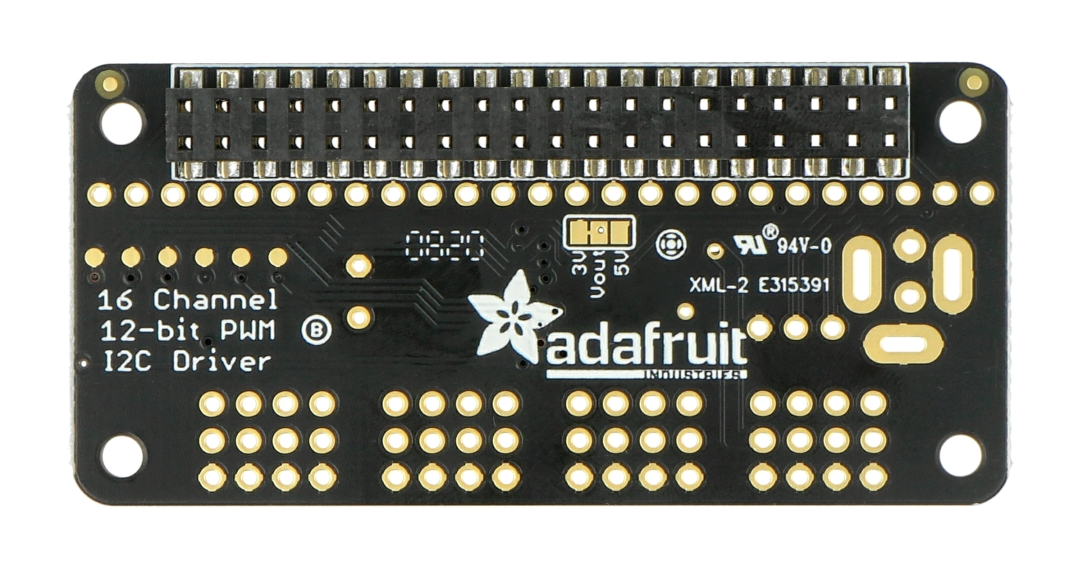
Schild für Raspberry Pi, mit dem Sie 16 Servos steuern können . Das System erzeugt ein PWM-Signal mit einer Frequenz von bis zu 1,6 kHz mit 12-Bit-Präzision. Das Board ist geeignet für Raspberry Pi 2 x 20 Anschlüsse, nicht geeignet für Raspberry mit 2 x 13 Pins.
Der Raspberry Pi ist ein sehr nützlicher Minicomputer, aber der Linux-Kernel ist nicht sehr gut darin, ein präzises PWM-Signal zu erzeugen, um die Servos über den Linux-Kernel zu steuern. Mit dem Servo Bonnet Overlay können Sie 16 Servos steuern . Das System erzeugt ein PWM-Signal mit einer Frequenz von bis zu 1,6 kHz mit 12-Bit-Präzision, es kommuniziert über die I2C-Schnittstelle mit nur zwei Raspberry-Pi-Pins. Pads können bis zu 62 Stück miteinander verbunden werden, wodurch Sie insgesamt 992 Servos steuern können.
Mit dem Schild können Sie Servos steuern, die mit einer Spannung von 5 V versorgt werden und mit einer logischen Spannung von 3,3 V arbeiten.
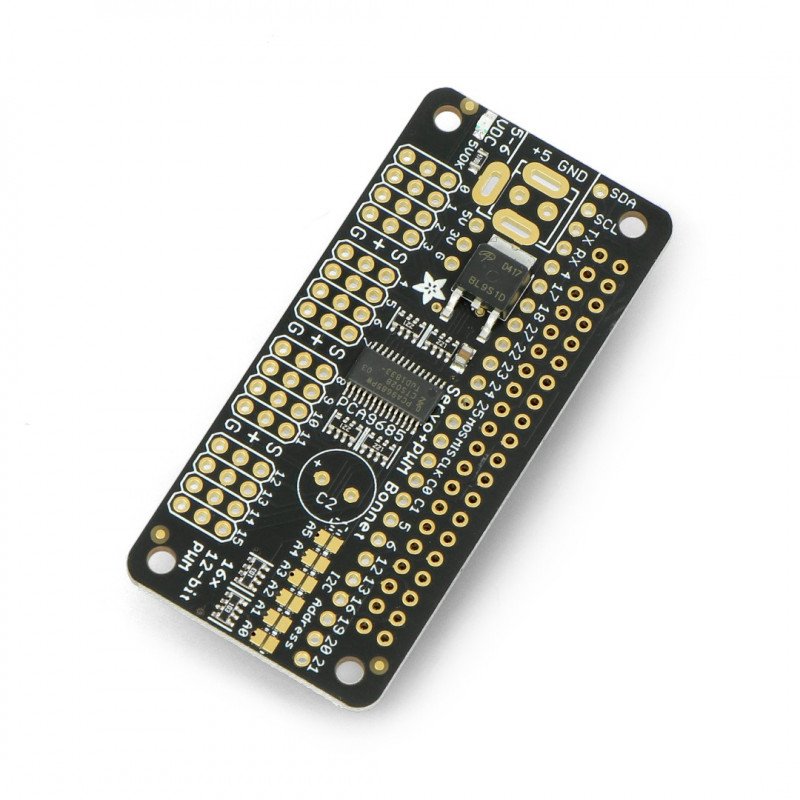
Um die Logikausgangsspannung von 3,3 V auf 5 V zu erhöhen, löten Sie den Jumper auf der Platine.
Das Servo Bonnet Overlay ist ein universeller PWM-Controller, der dem Anwender 16 PWM-Kanäle zur Verfügung stellt. Ihre Einstellungen können einfach durch Befehle geändert werden, die über den I2C-Bus gesendet werden. Die Logikpegel am Controller-Eingang sind an die Anforderungen der "Himbeer"-Ports angepasst (0..3,3 V), und die Ausgangs-PWM-Signale haben eine Amplitude von 5 V.
Servo Bonnet - 16-Kanal-PWM-I2C-Treiber für Raspberry Pi - Adafruit 3416 erzeugt Steuersignale mit einer Frequenz von bis zu 1600 Hz mit einer Auflösung von 12 Bit. Dadurch kann das Tastverhältnis in Schritten von ca. 1/40% eingestellt werden - es ist also mehr als ausreichend, um auch präziseste Servos anzusteuern.
Das Servo Bonnet Overlay erweitert die Möglichkeiten der Verwendung des Raspberry Pi zur Steuerung komplexer Strukturen erheblich - einschließlich Laufroboter oder Robotermanipulatoren basierend auf Modellierungsservos. Der Controller entlastet den Minicomputer-Prozessor erheblich und befreit ihn von der Notwendigkeit, Pulse in Echtzeit zu erzeugen.
Darüber hinaus ermöglicht der Treiber PWM Adafruit 3416 die Einstellung der I2C-Adresse (über Jumper auf der Platine), wodurch Sie mit nur zwei GPIO-Leitungen des Minicomputers sogar mehrere Dutzend Pads gleichzeitig steuern können. Dadurch ergeben sich vielfältige Möglichkeiten zum Aufbau von LED-Matrizen, Spektraldarstellungen oder anderen mehrkanaligen Lichteffekten.
Nützliche Links |
| Stromspannung aus | 5,0 V |
| Stromspannung Nieder | 5,0 V |
| Aktuelle Effizienz | Quellen |
| Anzahl der Kanäle | 16 |
| Niebezpieczne | Komponente |
| PAKETBREITE | 10.1 cm |
| PAKETHÖHE | 14.5 cm |
| PAKETTIEFE | 1.1 cm |
| PAKETGEWICHT | 0.015 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!

Produktinformation
Das Produkt ist eine Komponente, die für die weitere Montage/den Prototypenbau bestimmt ist. Es stellt kein eigenständiges fertiges Produkt im Sinne der Vorschriften über die Produktsicherheit dar.
Dane GPSR
Herkunftsland: der Vereinigten Staaten
Hersteller-Kontaktdaten: Adafruit Industries LLC, 168 39TH ST STE 1905CC, Brooklyn, NY 11232
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]






