



























































































































































































































































































Der digitale Näherungssensor führt die Laufzeitmessung durch . Er arbeitet im Bereich von 3 bis 200 cm mit einer Genauigkeit von +/- 3 %. Es kommuniziert über den I2C-Bus , es wird mit einer Spannung von 3,3 bis 5 V versorgt.
Der digitale Näherungssensor führt die Laufzeitmessung durch . Er arbeitet im Bereich von 3 bis 200 cm mit einer Genauigkeit von +/- 3 %. Es wird mit einer Spannung von 3,3 bis 5 V versorgt, hat einen eingebauten Spannungsregler und kommuniziert über den I2C-Bus . Das Modul verfügt über passive Elemente, die für den ordnungsgemäßen Betrieb des Systems erforderlich sind. Der Ausgang ist der Gravity-Anschluss, mit dem Sie das Modul mit dem im Kit enthaltenen Kabel anschließen können. Die Laufzeitmethode misst die Zeit vom Aussenden eines Infrarot-Laserpulses bis zu seiner Rückkehr zum Detektor. Sie ist unabhängig von der Lichtreflexion des Objekts.
DFRobot Gravity - VL53L0X Flugzeit - I2C Abstandssensor .
Das Produkt ist mit Arduino kompatibel Eine Anschlussanleitung und einen Mustercode finden Sie unter dieser Adresse. |
Das Modul kommuniziert mit dem Board über den Grove-Anschluss über die I2C-Schnittstelle.
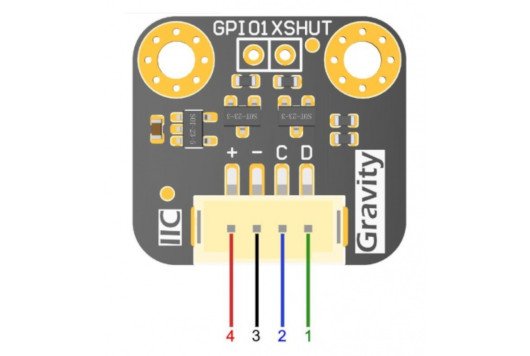
| Name | Beschreibung |
|---|---|
| + | Die Modulversorgungsspannung beträgt 3,3 bis 5 V. |
| - | Die Masse des Systems. |
| C. | I2C-Taktlinie. |
| D | I2C-Datenleitung. |
| XSHUT | Der Pin, der das Modul deaktiviert, wird durch den niedrigen Zustand aktiviert. Standard unter VDD. Der Low-Zustand schaltet den Sensor in einen Standby-Zustand. Details in der Dokumentation . |
| GPIO1 | Programmierbarer Interrupt-Ausgang. Details in der Dokumentation . |
Nützliche Links |
| Stromspannung aus | 3,3 V. |
| Stromspannung Nieder | 5,0 V |
| Schnittstelle | I2C |
| Modul - Entfernung Nieder | 200cm |
| Modul - Distanz aus | 0cm |
| Niebezpieczne | Komponente |
| PAKETBREITE | 7 cm |
| PAKETHÖHE | 1.1 cm |
| PAKETTIEFE | 9 cm |
| PAKETGEWICHT | 0.007 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!
Produktinformation
Das Produkt ist eine Komponente, die für die weitere Montage/den Prototypenbau bestimmt ist. Es stellt kein eigenständiges fertiges Produkt im Sinne der Vorschriften über die Produktsicherheit dar.
Dane GPSR
Herkunftsland: China
Hersteller-Kontaktdaten: Zhiwei Robotics Corp. Unit 01, 26/F, A1 Shanghai T & I Tower, No. 1699 Zhongke Road, Pudong District, Shanghai, P.R.China [email protected]
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]


