































































































































































































































































































Bausatz zum Bau einer zweirädrigen intelligenten JetBot- Roboterplattform . Die Aufgaben des Host-Controllers übernimmt das Waveshare Jetson Nano Kit, das mit Jetson Nano Module 16GB in eMMC-Version und 4GB Arbeitsspeicher ausgestattet ist. Dieser Controller ist verantwortlich für künstliche Intelligenz, Sprachverarbeitung, visuelle Verarbeitung, Kartierung und Navigation. Der Jetson Nano Developer Kit-Controller verwendet den Raspberry Pi RP2040 Dual-Core-Mikrocontroller, der eine bessere Echtzeitleistung und eine höhere Steuergenauigkeit aufweist und für die Erfassung von Haltungsdaten und die Bewegungssteuerung verantwortlich ist. JetBot hat die Funktionen der Gesichtserkennung, indem er einem Objekt oder einer Linie folgt. Das Gerät kann mithilfe des Kilometerzählers Karten erstellen und unterstützt die Kartenalgorithmen Gmapping, Hector, Karto und Cartographer.

JetBot - Kit zum Bau einer 2-Rad-Roboterplattform Al - kompletter Satz - Waveshare 22791.
JetBot - Kit zum Bau einer zweirädrigen Al-Roboterplattform mit einer Kamera - Routenkartierung.
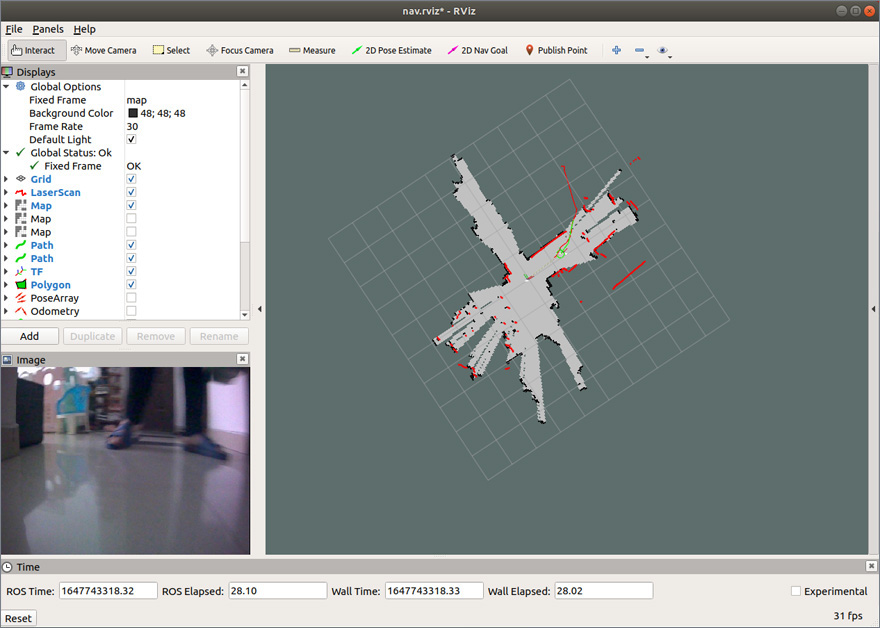
ROS ist ein Open-Source- Betriebssystem, das eine Sammlung von Softwarebibliotheken und Tools zum Entwerfen von Robotern enthält. Es bietet die vom Betriebssystem erwarteten Dienste, Gerätesteuerung der unteren Ebene, Nachrichtenübermittlung zwischen Prozessen und Paketverwaltung. ROS vereinfacht das Roboterdesign und ist weltweit der Mainstream der Robotersoftware. ROS-Software: rviz, gazebo, rosbang, rqt_*
JetBot unterstützt Single-Point-Navigation, Multi-Point-Patrouillennavigation und Echtzeit-Mapping.
Ein-Punkt-Führung : Nachdem der Roboter auf die Zielposition gezeigt hat, plant er automatisch einen Pfad, um zur Zielposition zu navigieren.
Mehrpunkt-Patrouillennavigation : Nach dem Hinzufügen von Wegpunkten bewegt sich der Roboter zwischen ihnen.
Kartierung während der Navigation : Nachdem der Roboter auf ein Ziel gezeigt hat, erkundet er automatisch den Weg zum Ziel und zeigt ihn auf der Karte an

Inhalt des Kits.
 JetBot - Set zum Bau einer 2-Rad-Roboterplattform Al.
JetBot - Set zum Bau einer 2-Rad-Roboterplattform Al.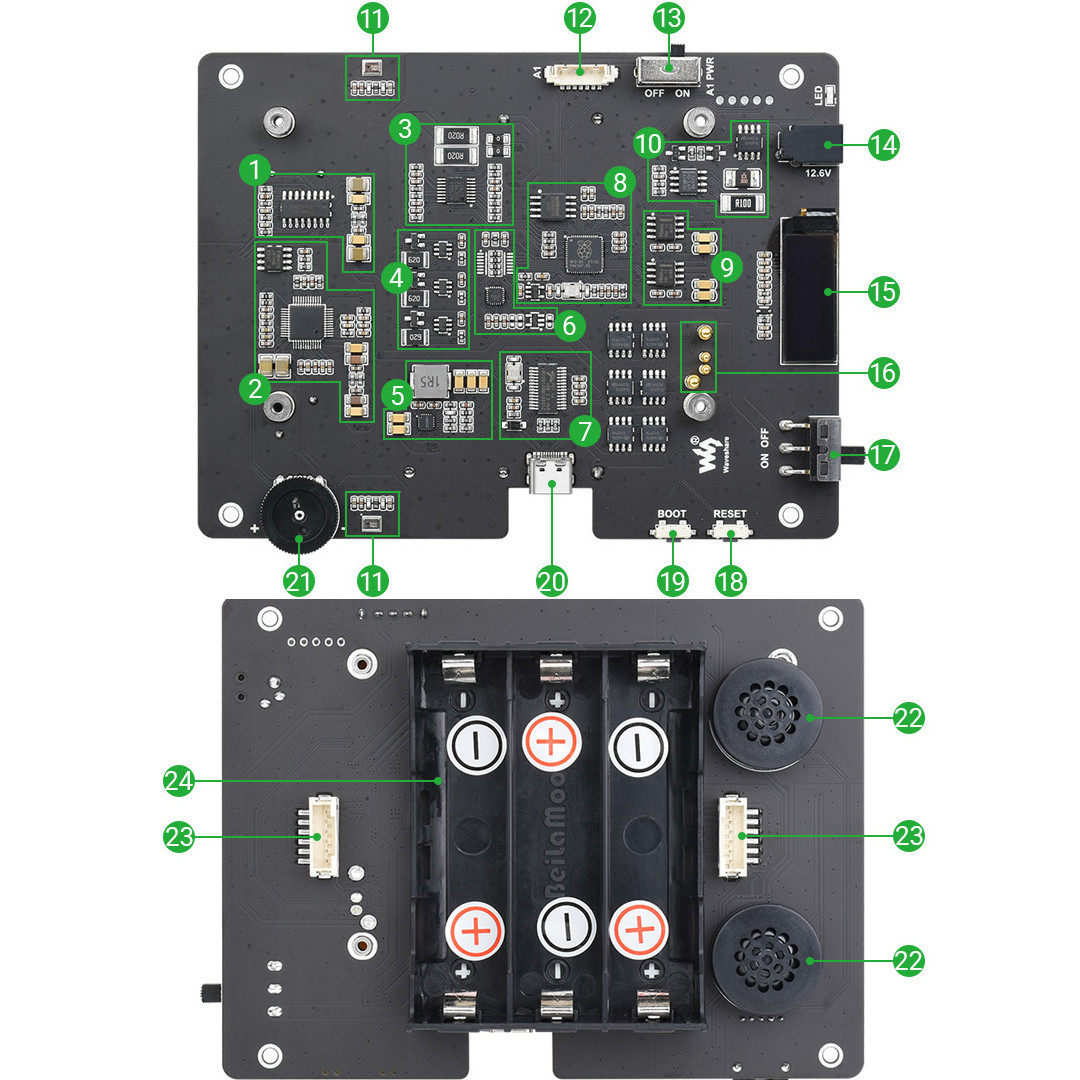
Beschreibung der Pins auf der Platine.
Nützliche Links |
| Fahrgestell - Anzahl der Räder | 2 |
| Fahrgestell - Typ | auf Rädern |
| Fahrgestell + Antrieb | Ja |
| Fahrgestell + Fahrer | Ja |
| Niebezpieczne | Komponente |
| PAKETBREITE | 35.3 cm |
| PAKETHÖHE | 21 cm |
| PAKETTIEFE | 21 cm |
| PAKETGEWICHT | 2.123 kg |
| Marek Długosz
07/29/25 | Frage: Guten Tag, sind im Bausatz 18650er Zellen enthalten oder muss man sie separat kaufen? Mit freundlichen Grüßen |
Antwort: Der Bausatz enthält keine Batterien - diese müssen separat erworben werden. | |

Produktinformation
Das Produkt ist eine Komponente, die für die weitere Montage/den Prototypenbau bestimmt ist. Es stellt kein eigenständiges fertiges Produkt im Sinne der Vorschriften über die Produktsicherheit dar.
Dane GPSR
Herkunftsland: China
Hersteller-Kontaktdaten: Seednew Limited 3/F, Building 6, Shanglilang Zhichuangyuan, Pingji Avenue, Nanwan Street, Longgang District, Shenzhen, 518115, China
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin






