


























































































































































































































































































Der Sensor basiert auf dem LSM6DS3TR-C- System, ausgestattet mit einem 3-Achsen- Beschleunigungsmesser und einem 3-Achsen-Gyroskop. Fügen Sie Ihrem Design ganz einfach Bewegungserkennungs- und Orientierungsfunktionen hinzu. Es ermöglicht die Messung der Linearbeschleunigung im Bereich von ± 2 / ± 4 / ± 8 / ± 16 g und der Winkelgeschwindigkeit im Bereich von ± 125 / ± 250 / ± 500 / ± 1000 / ± 2000 dps . Es verwendet den I2C / SPI -Bus für die Kommunikation. Das Board ist mit einem QT/Qwiic-Anschluss ausgestattet, was durch Prototyping erleichtert wird. Das Modul wird mit einer Spannung von 3 V oder 5 V versorgt.
Das Produkt ist mit Arduino kompatibel. Der Hersteller stellt ein Benutzerhandbuch und eine Bibliothek für Arduino bereit.
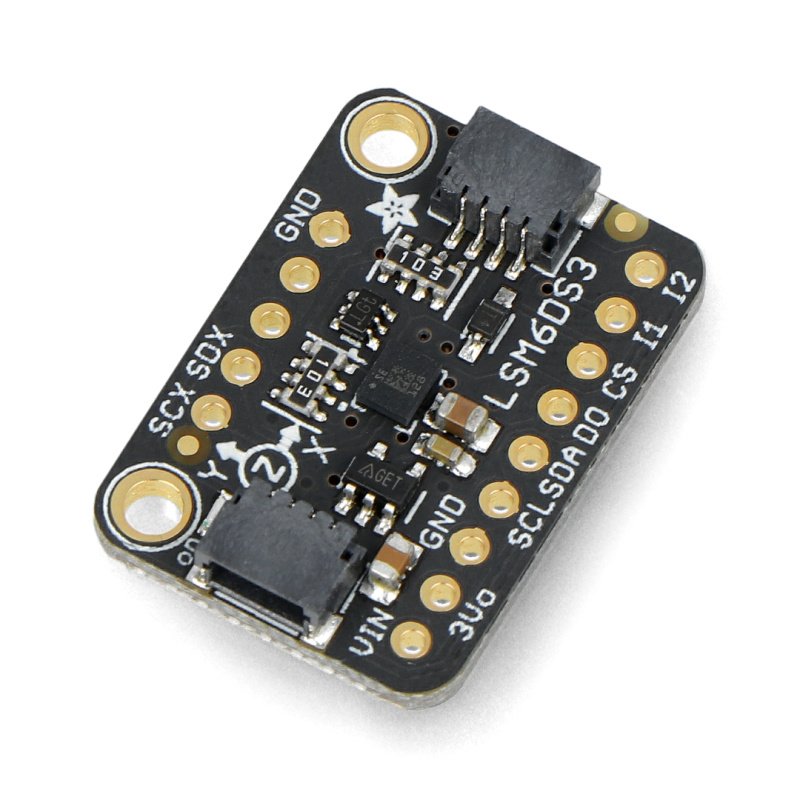
LSM6DS3TR-C 6-DoF IMU - 3-Achsen-Beschleunigungsmesser und Gyroskop - Adafruit 4503 .
Präsentation des vom Hersteller vorbereiteten Moduls .
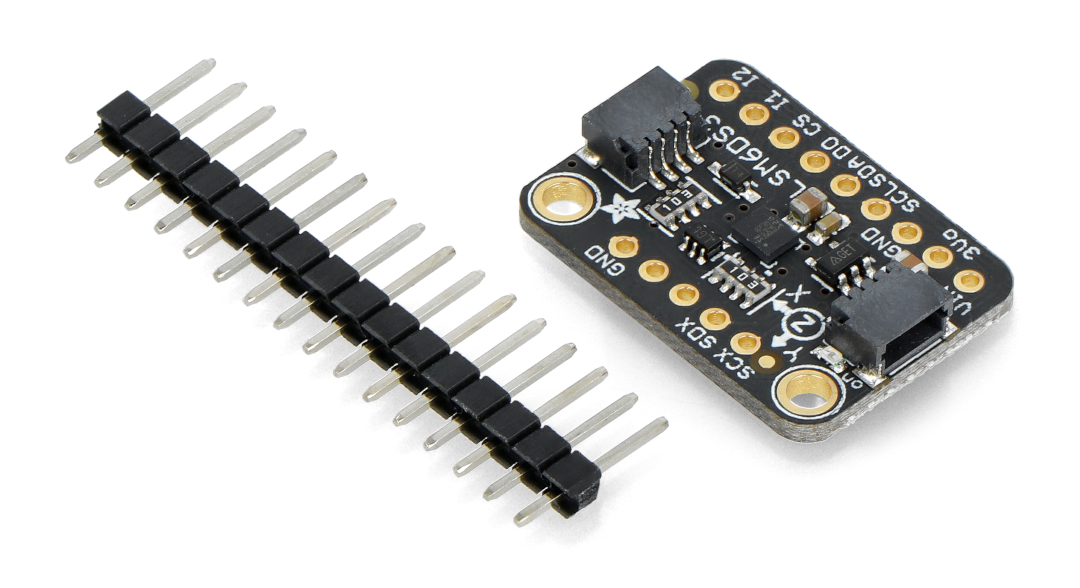
Leitungen auf beiden Seiten der Platine
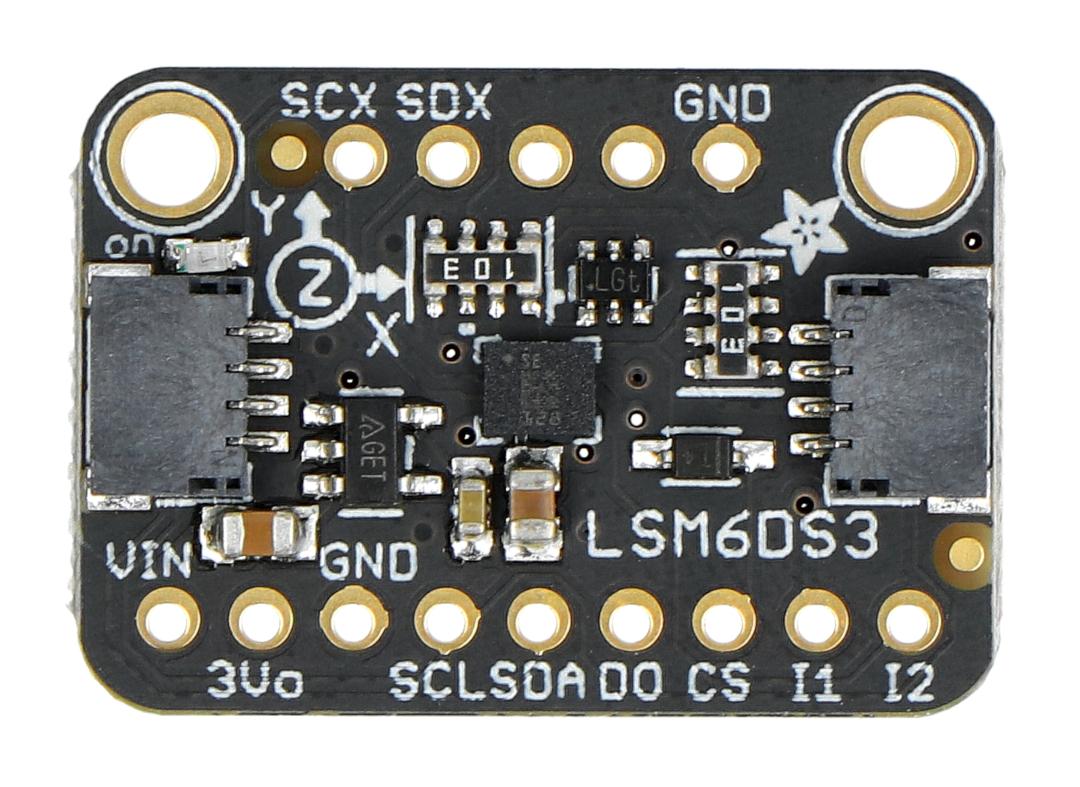
Detaillierte Informationen zu den Stiften der Modul- und Sensoradressen -Jumper finden Sie in der von Adafruit erstellten Bedienungsanleitung
Ein Beispiel für eine Sensoranwendung .
| Niebezpieczne | Komponente |
| PAKETBREITE | 7.5 cm |
| PAKETHÖHE | 12 cm |
| PAKETTIEFE | 0.5 cm |
| PAKETGEWICHT | 0.004 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!
Produktinformation
Das Produkt ist eine Komponente, die für die weitere Montage/den Prototypenbau bestimmt ist. Es stellt kein eigenständiges fertiges Produkt im Sinne der Vorschriften über die Produktsicherheit dar.
Dane GPSR
Herkunftsland: der Vereinigten Staaten
Hersteller-Kontaktdaten: Adafruit Industries LLC, 168 39TH ST STE 1905CC, Brooklyn, NY 11232
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]




