






































































































































































































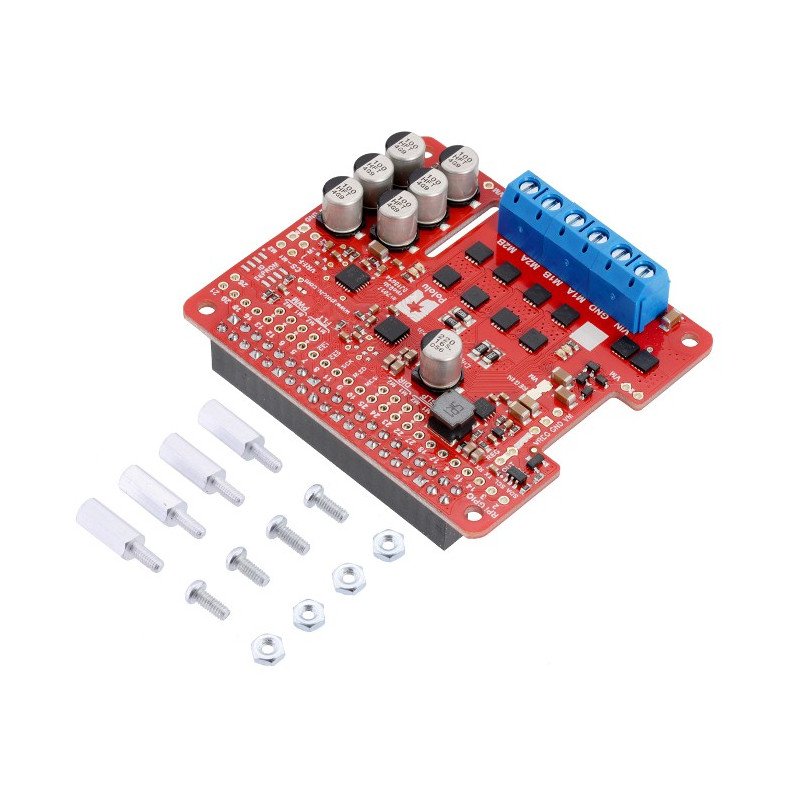








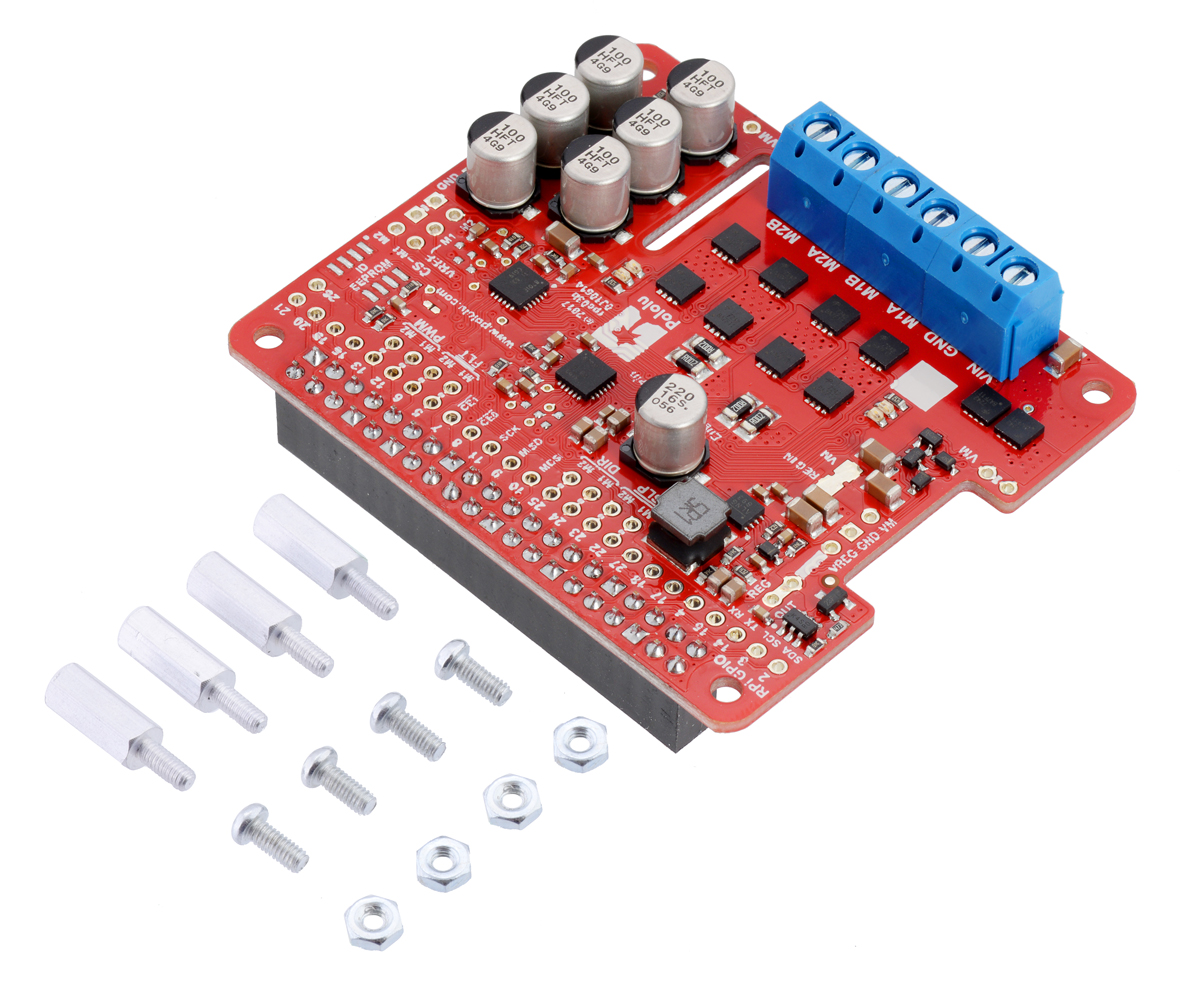
Abschirmung mit einem zweikanaligen Treiber von Motoren , die mit Spannungen von 6,5 V bis 36 V und Strömen bis zu 14 A pro Kanal (max. 40 A) arbeiten. Das System kann direkt an die GPIO-Anschlüsse der Minicomputer Raspberry Pi 3, 2, B+ und A+ angeschlossen werden.
Abschirmung mit einem zweikanaligen Treiber von Motoren , die mit Spannungen von 6,5 V bis 36 V und Strömen bis zu 14 A pro Kanal (max. 40 A) arbeiten. Das System kann direkt an die GPIO-Anschlüsse der Minicomputer Raspberry Pi 3, 2, B+ und A+ angeschlossen werden. Die Drehzahl kann über ein PWM - Signal gesteuert werden .
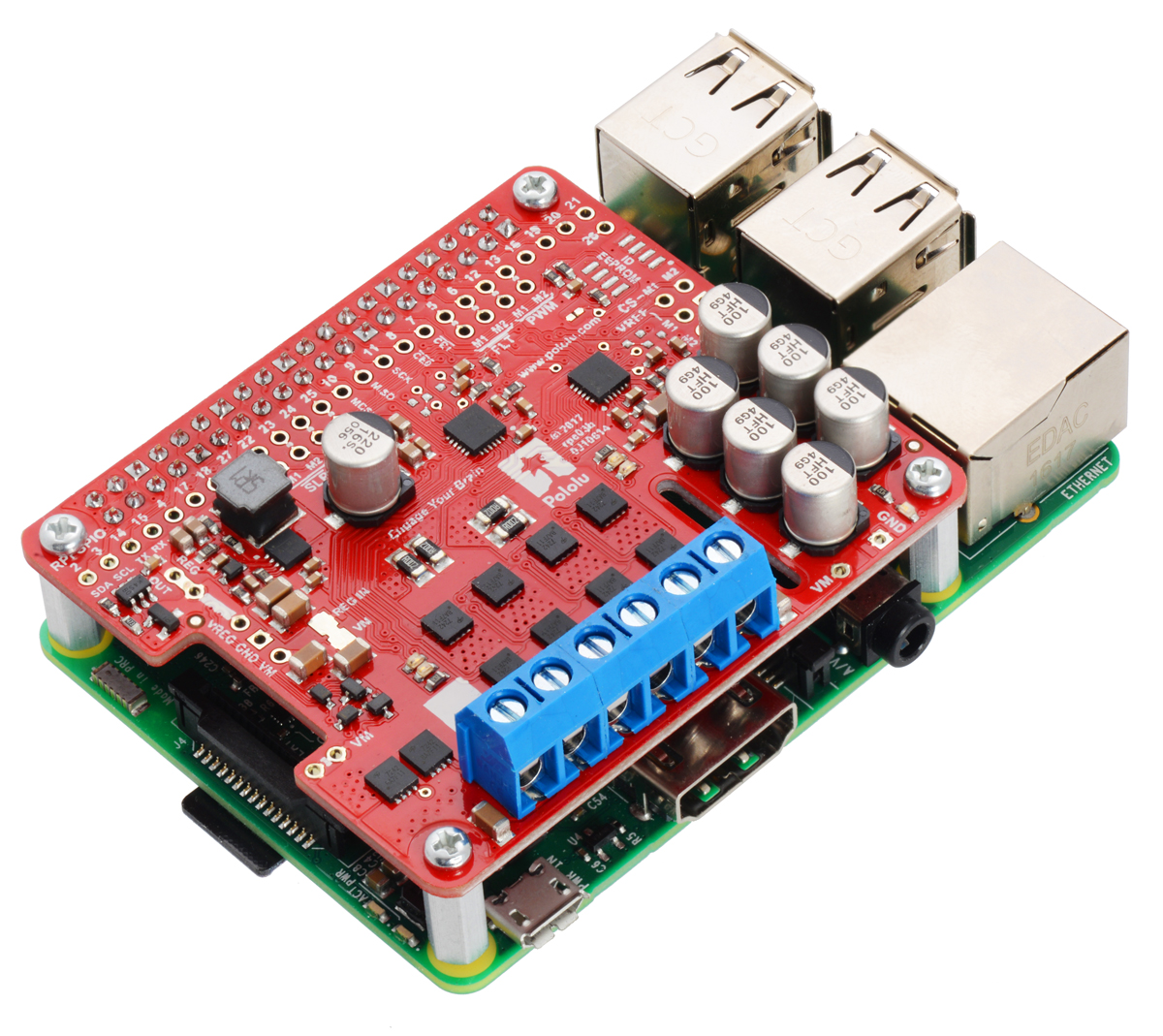
In Verbindung mit dem Raspberry Pi können Sie unter Verwendung einer speziell vorbereiteten Bibliothek ganz einfach die Geschwindigkeit und Drehrichtung von zwei Gleichstrommotoren steuern. Die Form und die Anschlüsse der Platine ermöglichen eine direkte Verbindung mit dem Minicomputer. Der Chip verwendet einen 40-poligen GPIO-Anschluss.
Gegenstand des Verkaufs ist ein Schild mit Motortreiber, der Minicomputer Raspberry Pi kann separat erworben werden.
|
Das Produkt ist mit dem Raspberry Pi kompatibel Der Hersteller stellt eine Python-Bibliothek für Raspberry-Pi-Anwender bereit. |
Die Stromversorgung der Motoren wurde vom Raspberry Pi getrennt. Die Spannung im Bereich von 6,5 V bis 36 V sollte an die Pins VIN und GND angeschlossen werden. Spannungsversorgung des Logikteils 3,3 V wird vom Minicomputer abgenommen.
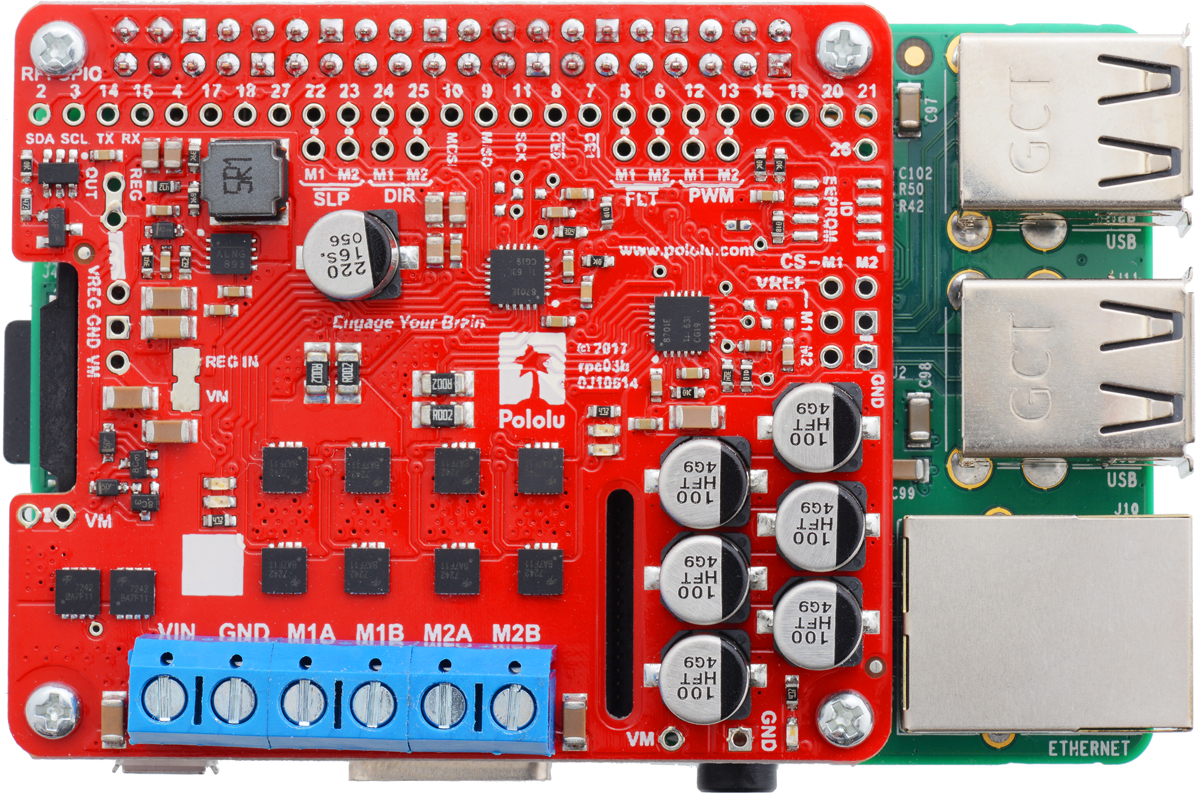
Die folgende Tabelle zeigt, welche Pins des Raspberry Pi vom Motortreiber verwendet werden:
|
RPi-Pin GPIO |
Stift Treiber |
Beschreibung |
|---|---|---|
| 5 | Motor 1 FEHLER |
Status-Pin. Standard im hohen Zustand. Wenn ein Treiberfehler erkannt wird, geht es auf Low. |
| 6 | Motor 2 FEHLER |
Status-Pin. Standard im hohen Zustand. Wenn ein Treiberfehler erkannt wird, geht es auf Low. |
| 12 | PWM-Motor 1 |
PWM-Eingang zur Steuerung der Motordrehzahl. Die maximale PWM-Frequenz beträgt 100 kHz. |
| 13 | PWM-Motor 2 |
PWM-Eingang zur Steuerung der Motordrehzahl. Die maximale PWM-Frequenz beträgt 100 kHz. |
| 22 | Motor 1 SLP |
Standardmäßig bedeutet der Low-Zustand getrennte Motorausgänge. Um den Treiber zu starten, sollte der High-Status gegeben sein. |
| 23 | Motor 2 SLP | Standardmäßig bedeutet der Low-Zustand getrennte Motorausgänge. Um den Treiber zu starten, sollte der High-Status gegeben sein. |
| 24 | Motor 1 RICHT |
Stift zur Auswahl der Drehrichtung. Im Low-Zustand fließt der Strom vom Ausgang A nach B. Im High-Zustand - von B nach A. |
| 25 | Motor 2 RICHT | Stift zur Auswahl der Drehrichtung. Im Low-Zustand fließt der Strom vom Ausgang A nach B. Im High-Zustand - von B nach A. |
Die Tabelle zeigt die Betriebsarten in Abhängigkeit der Eingänge:
| SLP | DIR | PWM | MxA | MxB | Betriebsart |
|---|---|---|---|---|---|
| 1 | 0 | PWM | PWM (H/L) | L. | Vorwärtsdrehung mit angegebener PWM%-Geschwindigkeit. |
| 1 | 1 | PWM | L. | PWM (H/L) | Rückwärtsdrehung mit angegebener PWM%-Geschwindigkeit. |
| 1 | x | 0 | L. |
L. |
Bremsen (Ausgänge mit Masse verbunden). |
| 0 | x | x | AUS | AUS | Deaktivierte Ausgänge. |
|
Der Regler verfügt über keine automatische Abschaltfunktion bei Überschreitung der zulässigen Temperatur. |
Nützliche Links |
| Stromspannung aus | 6,5 V |
| Stromspannung Nieder | 36 V |
| Anzahl der Kanäle | 2 |
| PAKETBREITE | 0 cm |
| PAKETGEWICHT | 0.034 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!
Herkunftsland: der Vereinigten Staaten
Hersteller-Kontaktdaten: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin














