




























































































































































































































































































Der auf dem DRV8711-System basierende Schrittmotortreiber ermöglicht die Ansteuerung eines bipolaren Schrittmotors. Es wird mit einer Spannung von 8 V bis 50 V betrieben, mit einer maximalen Stromaufnahme von 6 A pro Spule. Maximale Auflösung: 1/256 Schritte . Das Modul erlaubt den Stromfluss bis 4 A ohne Kühlkörper.
Der auf dem DRV8711 -System basierende Schrittmotortreiber ermöglicht die Ansteuerung eines bipolaren Schrittmotors. Der Treiber ermöglicht es Ihnen, den Motor mit einer einfachen Schritt- und Richtungsschnittstelle zu steuern, aber zuerst muss er über die SPI-Schnittstelle konfiguriert werden. Dies bedeutet, dass das Steuermodul im Master-Modus des SPI-Busses arbeiten können muss (z. B. Arduino ) und an den SDATi-, SCLK- und SCS-Pins angeschlossen werden muss. Darüber hinaus verfügt der Controller über zahlreiche Schutzfunktionen, wie z. B. Schutz gegen Rückspannung, zu niedrige Spannung. Der Controller ist mit einer PWM-Schnittstelle ausgestattet, mit der Sie zwei Gleichstrommotoren steuern können.
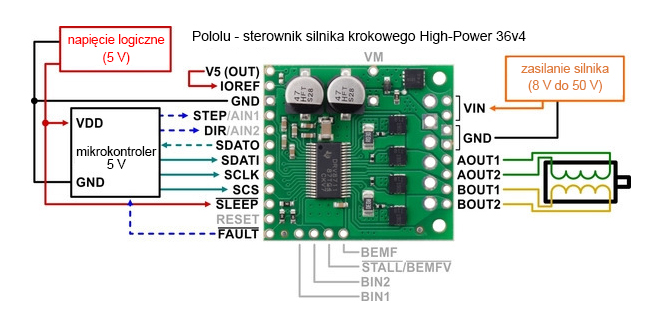
Komplexer Schrittmotortreiber - Pololu 36v4.
| Stift | Beschreibung |
|---|---|
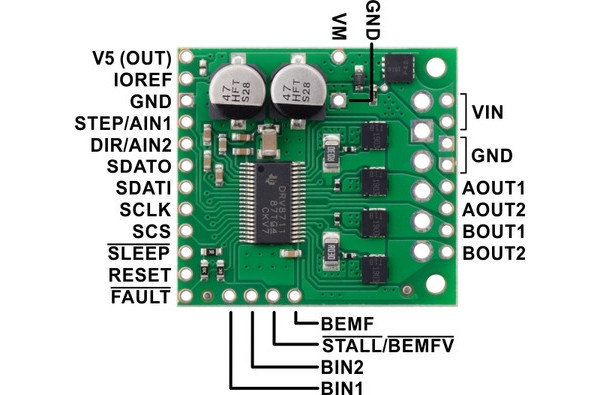
| Fahrgestellnummer | Schrittmotor-Netzteil, 8 bis 50 V (Verpolungsschutz bis 40 V) |
| VM | Pin, der Zugang zur Stromversorgung des Schrittmotors bietet. |
| Masse | Die Masse des Systems. |
AUS1 AUS2 | Motorausgänge: Eine Phasenspule endet. |
KAMPF1 KAMPF2 | Motorausgänge: Enden der Spule der Phase B |
V5 (AUS) | Einstellbarer 5-V-Ausgang Bietet Zugriff auf Spannung vom internen DRV8711-Regler. Der Regler kann maximal 10 mA liefern. |
IOREF | Alle Signalausgänge am Controller (außer BEMF) sind Open-Collector-Typen, die auf den IOREF-Pin hochgezogen werden, daher sollten sie mit einer Spannung versorgt werden, die der logischen Spannung des Steuermoduls entspricht (z. B. 3,3 V, wenn das Steuermodul mit arbeitet eine Logikspannung von 3,3 V). Wenn der Controller mit einem Modul verwendet wird, das mit 5 V Spannung betrieben wird, kann es an den benachbarten 5 V-Pin (OUT) angeschlossen werden. |
SCHRITT / AIN1 | Ein an den STEP-Pin gegebener Impuls bewirkt einen Motorschritt, die Bewegung des Motors kann auch über die SPI-Schnittstelle gesteuert werden, sodass die Verwendung dieses Pins optional ist. Im PWM-Betriebsmodus fungiert er als AIN1 anstelle von STEP und steuert direkt den Zustand des Ausgangs AOUT1. |
DIR/AIN2 | Eingang, der die Drehrichtung des Schrittmotors definiert. Die Richtung kann auch über die SPI-Schnittstelle gesteuert werden, daher ist die Verwendung dieses Pins optional. Im PWM-Betriebsmodus fungiert er als AIN1 anstelle von STEP und steuert direkt den Zustand des Ausgangs AOUT1. |
SDATO | Pin, auch als MISO bekannt, wird zum Senden von Daten in der SPI-Schnittstelle verwendet. |
SDATI | Pin, auch bekannt als MOSI, wird verwendet, um Daten in der SPI-Schnittstelle zu empfangen. |
SCLK | SPI-Taktlinie. |
SCS | Adressierung des SPI-Systems. |
SCHLAFEN | Standardmäßig befindet sich der Pin im Low-Zustand, was einen Schlafmodus bewirkt, in dem die Motorsteuerung ausgeschaltet ist und alle analogen Schaltkreise im Low-Power-Modus sind, während die digitalen Schaltkreise noch aktiv sind, was den Zugriff auf den Treiber durchlässt die serielle Schnittstelle. Um das Gerät zu starten, muss der Pin hoch sein. |
ZURÜCKSETZEN | System-Reset, aktiviert mit High-Zustand. Die Funktion funktioniert nicht, wenn sich das Gerät im Schlafmodus befindet. |
FEHLER | Der Pin ist standardmäßig hoch. Geht auf Low, wenn ein Fehler auftritt. |
BIN1 | Im PWM-Modus steuert es direkt den Status des BOUT1-Ausgangs. |
BIN2 | Im PWM-Betriebsmodus steuert es direkt den Status des BOUT2-Ausgangs. |
STALL / BEMFV | Open-Collector-Ausgang, direkt mit dem IOREF-Pin verbunden. Der Ausgang wird niedrig, wenn ein Motorstopp erkannt wird. |
BEMF | EMF-Analogausgang. Das Ausgangssignal an diesem Pin kann verwendet werden, um fortschrittlichere Algorithmen und die Erkennung von Motorstopps zu implementieren. |
Obwohl Sie mit Pololu 36v4 den Motor über eine einfache Stepper- und Richtungsschnittstelle steuern können, muss er zuerst über den SPI-Bus konfiguriert werden , was bedeutet, dass das Steuermodul in der Lage sein muss, im SPI-Schnittstellen-Mastermodus zu arbeiten und sich mit dem SDATi zu verbinden. SCLK- und SCS-Pins. SDATO- und FAULT-Pins werden bei Verwendung des Treibers nicht benötigt.
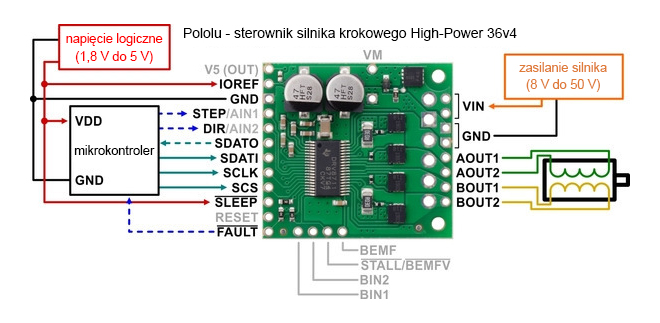
Ein beispielhaftes Diagramm zum Verbinden des Pololu 36v4-Controllers mit einem Mikrocontroller.
Der Pololu 36v4-Controller ist mit einem internen 5-V-Regler ausgestattet, der verwendet werden kann, um den IOREF-Pin mit Strom zu versorgen, wenn die Platine mit einem Mikrocontroller verwendet wird, der mit einer logischen Spannung von 5 V arbeitet. Zu diesem Zweck können Sie den beigefügten Jumper oder verwenden Löten Sie die Pads auf der Platine.
Die Platine verfügt über Lötpads, mit denen Sie die 5-V- (OUT) und IOREF-Leitungen dauerhaft anschließen können.
Warnung! Das Anschließen und Trennen des Motors bei eingeschalteter Steuerung kann das System beschädigen. |
Der Hersteller stellt auf GitHub eine fertige Bibliothek mit Beispiel-Sketches für Arduino-Boards zur Verfügung, die grundlegende Funktionen zum Konfigurieren und Betreiben des Controllers bereitstellt.
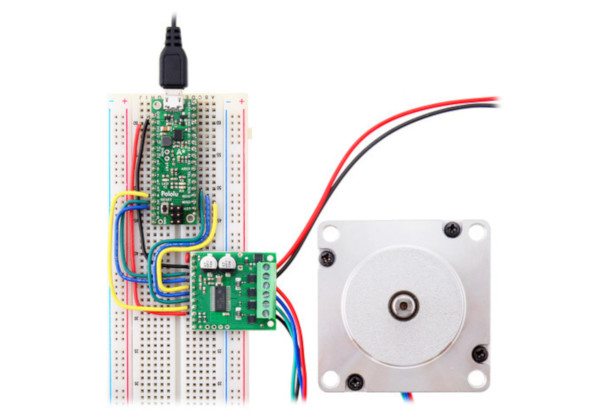
Anschließen des Controllers an ein mit Arduino kompatibles Modul .
Nützliche Links |
| Stromspannung aus | 8,0 V |
| Stromspannung Nieder | 50,0 V |
| Aktuelle Effizienz | 6 A. |
| Anzahl der Kanäle | 1 |
| Niebezpieczne | Komponente |
| PAKETBREITE | 8 cm |
| PAKETHÖHE | 0.5 cm |
| PAKETTIEFE | 7.5 cm |
| PAKETGEWICHT | 0.01 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!

Produktinformation
Das Produkt ist eine Komponente, die für die weitere Montage/den Prototypenbau bestimmt ist. Es stellt kein eigenständiges fertiges Produkt im Sinne der Vorschriften über die Produktsicherheit dar.
Dane GPSR
Herkunftsland: der Vereinigten Staaten
Hersteller-Kontaktdaten: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin




