
































































































































































































































































































12-Kanal-Servocontroller mit Unterstützung für digitale und analoge Signale. Der Benutzer kann die Server steuern über: PC (USB)-Anwendung, serielle Schnittstelle und einfache Skriptsprache.
12-Kanal-Servocontroller mit Unterstützung für digitale und analoge Signale. Der Benutzer kann die Server steuern über: PC (USB)-Anwendung, serielle Schnittstelle und einfache Skriptsprache.
Das Produkt ist mit Arduino kompatibel Für Arduino-Anwender stellt der Hersteller auf GitHub eine Bibliothek bereit. |

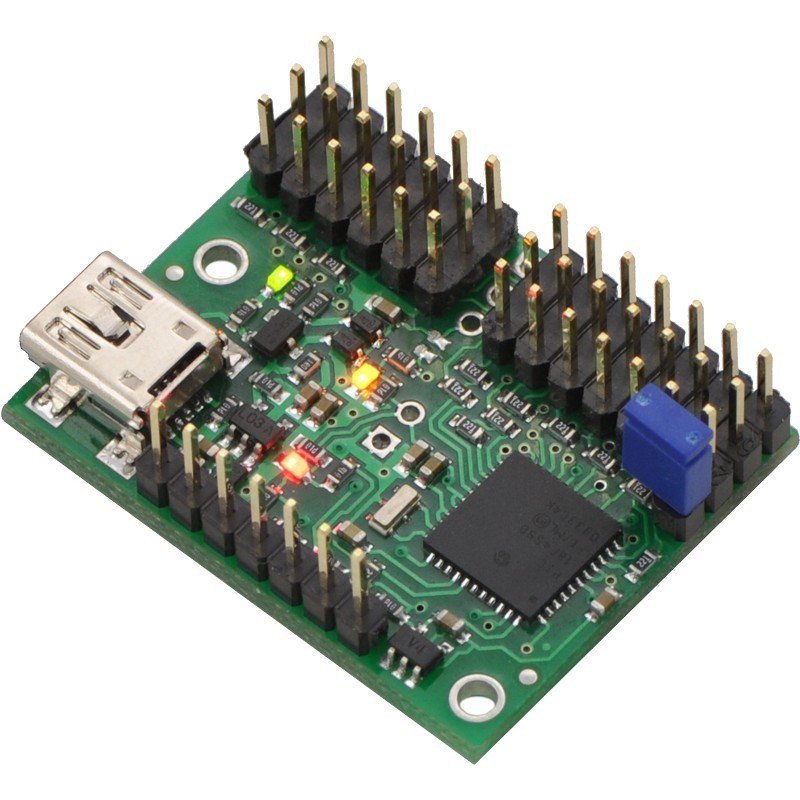
Mini Maestro USB 12-Kanal-Servotreiber - Pololu 1352.
Ein Film der Firma Pololu, der die Möglichkeiten des Produkts vorstellt.
Die Maestro-Serie sind vielseitige Servocontroller , die auch digitale und analoge Signale interpretieren können. Dank vielfältiger Steuerungsmöglichkeiten, einer großen Auswahl an Versorgungsspannungen und einer einfachen Bedienung funktioniert Maestro in vielen Projekten mit Servos. Je nach Anzahl der verwendeten Servos kann der Anwender die passende Version auswählen. Es stehen Module mit 6 , 12 , 18 und 24 Kanälen zur Verfügung.
| | | ||
| Anzahl der Kanäle: | 6 | 12 | 18 | 24 |
| Anzahl analoge Eingänge: | 6 | 12 | 12 | 12 |
| Anzahl der digitalen Eingänge: | 0 | 0 | 6 | 12 |
| Breite [mm]: | 21.6 | 27.9 | 27.9 | 27.9 |
| Länge [mm]: | 30.5 | 36.1 | 45.7 | 58.4 |
| Gewicht [g]: | 3.0 | 4.2 | 4.9 | 6.0 |
| Pulsfrequenz: | 33-100 Hertz | 1-333Hz | 1-333Hz | 1-333Hz |
| Impulsbereich: | 64–3280 μs | 64–4080 μs | 64–4080 μs | 64–4080 μs |
| Schriftgröße: | 1 KB | 8 KB | 8 KB | 8 KB |
Der Benutzer kann den Controller an die Bedürfnisse seines Projekts anpassen, indem er aus drei verschiedenen Kommunikationsschnittstellen wählt:
USB-Computeranwendung – das Gerät wird über ein Mini-USB-Kabel mit dem Computer verbunden. Zur Bedienung des Controllers wird ein intuitives Programm verwendet, das unter anderem Folgendes ermöglicht:
Um die USB-Steuerungsoption zu verwenden, reicht es aus, das Programm auf die Festplatte herunterzuladen (Version: Windows , Linux ), es auszuführen und den Controller an einen beliebigen USB-Anschluss des Computers anzuschließen.
Serielle Schnittstelle (UART) - Die Schnittstelle ermöglicht es Ihnen, den Maestro mit der Zentraleinheit zu verbinden, die ein beliebiger Mikrocontroller oder Entwicklungskit sein kann, z.B. Arduino , STM32Discovery oder Himbeer-Pi . Servomechanismen werden durch Senden von Sonderzeichenbefehlen betrieben. Beispiele und Befehlsbeschreibungen finden Sie im Handbuch .
Skript - durch Auswahl dieser Option kann der Benutzer eine ausgewählte Abfolge von Ereignissen erstellen und im Speicher des Maestro speichern , z. Beschleunigungsmesser oder Entfernungsmesser . Die Beschreibung der Skriptsprache mit Anwendungsbeispielen finden Sie im Handbuch .
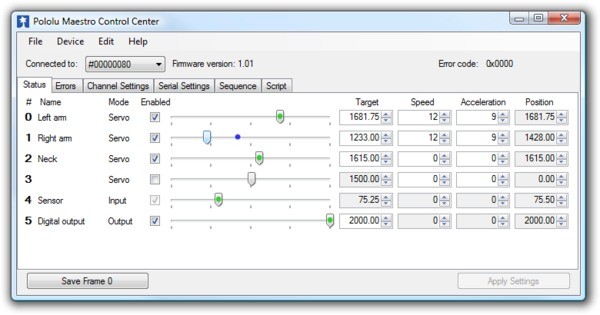
Eine Computeranwendung, mit der Sie die Position und Geschwindigkeit von Servos steuern, E / A-Zustände über ein USB-Kabel lesen und speichern können.
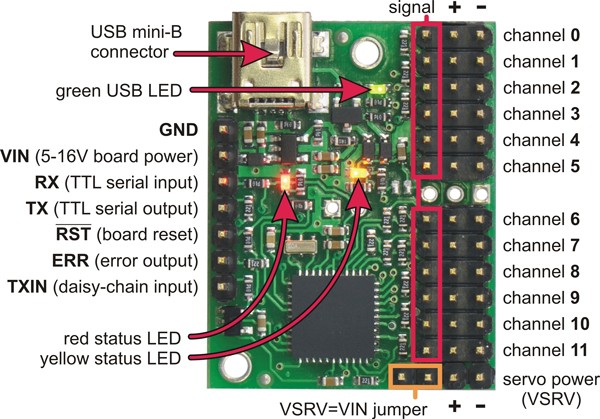
Die Verteilung der Pins des Maestro-Treibers.
Pins sind beliebte Goldpin-Streifen (2,54 Raster), abgestimmt auf Standard- Servostecker und Verbindungskabel .
| Stromspannung aus | 5,0 V |
| Stromspannung Nieder | 16,0 V |
| Aktuelle Effizienz | Quellen |
| Anzahl der Kanäle | 12 |
| Niebezpieczne | Komponente |
| PAKETBREITE | 7.5 cm |
| PAKETHÖHE | 1 cm |
| PAKETTIEFE | 8.5 cm |
| PAKETGEWICHT | 0.009 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!

Produktinformation
Das Produkt ist eine Komponente, die für die weitere Montage/den Prototypenbau bestimmt ist. Es stellt kein eigenständiges fertiges Produkt im Sinne der Vorschriften über die Produktsicherheit dar.
Dane GPSR
Herkunftsland: der Vereinigten Staaten
Hersteller-Kontaktdaten: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin



 Mikro
Mikro







