





























































































































































































































































































Effizienter Einkanal-DC-Motortreiber. Dauerstrom pro Kanal 17 A (kurzzeitig bis 100 A), Motorspannung 6,5 V bis 30 V, Spannung des Logikteils 1,8 V bis 5,5 V. Das Gerät verfügt außerdem über einen Stromflusssensor und die Möglichkeit der Motorbegrenzung aktuell.
Mit dem Modul können Sie einen Gleichstrommotor steuern. Der Motor kann mit einer Spannung von 6,5 bis 30 V mit einer Dauerstromaufnahme von bis zu 17 A, kurzzeitig (für 10 ms) bis zu 100 A betrieben werden. Die Geschwindigkeit kann durch ein PWM-Signal gesteuert werden, die Richtung mittels ein digitaler Ausgang DIR - der einen niedrigen Zustand (logisch 0) oder einen hohen Zustand (logisch 1) liefert. Das Gerät verfügt außerdem über einen Stromflusssensor und die Möglichkeit, den Motorstrom zu begrenzen.
Das Kit enthält einen Treiber und Anschlüsse zum Selbstlöten.
Der Anschluss des Motors und dessen Stromversorgung befinden sich auf einer Seite des Moduls. Die Steuerpins (logischer Teil von 1,8 V bis 5 V) befinden sich auf der anderen Seite des Moduls. Die Stromversorgung des Motors ist in der Lage, hohe Ströme zu liefern. Sie können Goldpin-Stecker oder Schraubstecker (beides im Lieferumfang enthalten) an die Motoranschlüsse löten.
Um einen hohen Wirkungsgrad zu gewährleisten, ist es sehr wichtig, einen großen Kondensator so nah wie möglich am Modul zwischen Motorstromversorgung und Masse zu schalten. Es wird empfohlen, einen Kondensator mit einer Kapazität von mindestens mehreren hundert μF zu verwenden. Die erforderliche Leistung hängt von vielen Faktoren ab, z.B. der Qualität und Entfernung der Stromquelle (über 30 cm), den Parametern des Motors und der Frequenz des PWM-Signals. Der Kondensator kann an die mit "+" und "-" gekennzeichneten Löcher (VM bzw. GND) angeschlossen werden. Der Controller verfügt über einen eingebauten 100-μF-Kondensator, der für grundlegende Anwendungen ausreicht. Für die meisten Layouts wird jedoch die Verwendung eines größeren empfohlen.
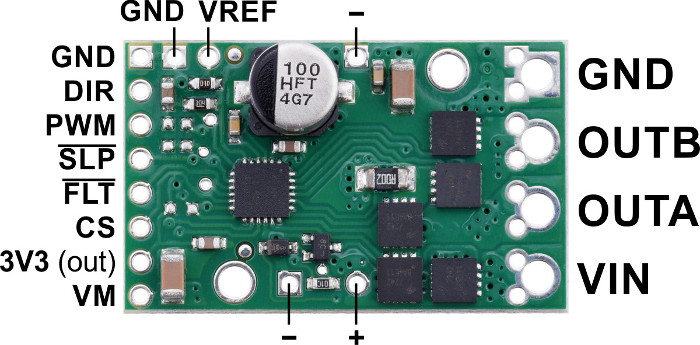
Der logische Teil des Moduls arbeitet mit einer Spannung von 1,8 V bis 5 V (maximal 5,5 V). Standardmäßig befindet sich der Treiber im Ruhezustand. Um es auszuführen, verbinden Sie den SLP-Pin mit dem High-Zustand. In typischen Anwendungen werden nur zwei zusätzliche PWM- und DIR-Pins benötigt.
| STIFT | Beschreibung |
|---|---|
|
Fahrgestellnummer |
Die Motorversorgungsspannung reicht von 6,5 V bis 40 V verpolsicher. |
| VM | Der Stift ermöglicht den Zugang zur Stromversorgung des Motors, die gegen Verpolung geschützt ist. Es kann verwendet werden, um Energie von der umgekehrten Verbindung zu anderen Elementen zu liefern. Es sollte nicht mit hohem Strom verwendet werden. Als Ausgang verwendeter Pin. |
| + und - | Die Pins zum Anschluss des Kondensators sind mit VM bzw. GND verbunden. |
| 3v3 | Geregelter 3,3-V-Ausgang, der einige Milliampere zur Versorgung kleiner Komponenten bereitstellt. Es kann nicht an andere externe Stromleitungen angeschlossen werden. Aus, wenn sich der Controller im Schlafmodus befindet. Achten Sie auf einen Kurzschluss mit dem V + -Pin, da dies die Platine beschädigen kann. |
| Masse | Die Masse des Systems. |
| AUSA | Ausgangsstift zum Motor (verbunden mit einem der Motoranschlüsse). |
| AUSB | Ausgangsstift zum Motor (verbunden mit der anderen Motorklemme). |
| PWM | PWM-Eingangssignal für die Motorsteuerung. Standardmäßig niedrig. |
| DIR |
Drehrichtungsstift des Motors. Strom fließt von OUTA nach OUTB, wenn er niedrig ist, und von OUTB nach OUTA, wenn er hoch ist. Standardmäßig niedrig. |
| SLP | Pin, der den Controller in den Schlafmodus versetzt. Standardmäßig niedrig (Schlaf). |
| FLT | Fehleranzeige. Niedrig gesetzt, nachdem ein Fehler erkannt wurde. Um es zu verwenden, muss es mit dem hohen Zustand (Spannung der Logik des Systems) verbunden werden. |
| CS | Stromempfindlichkeitsausgang. Erzeugt eine dem Motorstrom proportionale Spannung: 400 mV / A + 50 mV Offset. |
| VREF | Referenzspannungseingang. Schließen Sie einen Widerstand an Masse an, um den maximalen Ausgangsstrom zu begrenzen. Ohne zusätzlichen Widerstand beträgt der Maximalwert 30 A. |
Die Tabelle zeigt die Abhängigkeiten der Ausgänge von den Eingangssignalen:
H - hoher Zustand
L - niedriger Zustand
X - irrelevant
|
PWM |
DIR |
AUSA | AUSB | Der Zustand des Motors |
|---|---|---|---|---|
|
H. |
H. | H. | L. |
Der Motor dreht im Uhrzeigersinn mit % PWM-Geschwindigkeit. |
|
H. |
L. | L. | H. |
Der Motor dreht mit % PWM-Geschwindigkeit gegen den Uhrzeigersinn. |
|
L. |
X | L. | L. | Bremsen. |
Der Controller unterstützt eine PWM-Frequenz von bis zu 100 kHz, die Schaltverluste sind jedoch proportional zur Frequenz. Die Standardfrequenz beträgt 20 kHz.
Die PWM-High-Pulslänge muss mindestens 0,5 μs betragen, um eine Änderung in den Ausgängen zu erzeugen, sodass niedrige Arbeitszyklen bei hohen Frequenzen unmöglich werden. Beispielsweise beträgt bei 100 kHz die Impulsperiode 10 µs und das minimale Nicht-Null-Tastverhältnis 0,5 / 10 oder 5 %.
Der CS-Ausgang ist nur aktiv, wenn sich die H-Brücke im Treibermodus befindet. Es ist inaktiv (niedriger Zustand), wenn sich die Steuerung im Bremsmodus befindet, was passiert, wenn die PWM niedrig oder die Strombegrenzung aktiv ist. Der Strom fließt immer noch durch den Motor, wenn die Steuerung zu bremsen beginnt, aber der Strom an Pin CS spiegelt nicht den Motorstrom im Bremsmodus wider. Die CS-Spannung wird intern vom Treiber verwendet, um Interferenzen zu vermeiden, laden Sie keine kapazitive Last (Kondensator) auf diesen Pin oder verbinden Sie ihn mit einer Last über einigen mA.
Das Treibermodul hat die Fähigkeit, den Motorstrom durch Schneiden zu begrenzen. Wenn der Strom den Schwellenwert erreicht, wechselt die Steuerung für kurze Zeit in den Bremsmodus, bevor der Motor wieder eingeschaltet wird. Es ist praktischer, einen Controller mit einem Motor zu verwenden, der ein paar Ampere zum Laufen benötigt, aber viel mehr zum Starten.
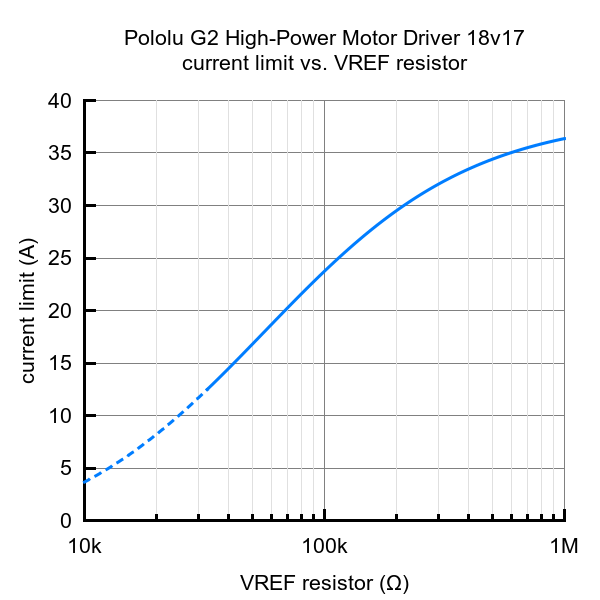
Standardmäßig beträgt die Stromgrenze 30 A. Sie kann durch Installation eines Widerstands zwischen den VREF- und GND-Pins gesenkt werden. Das folgende Diagramm zeigt die Beziehung zwischen dem Widerstandswert an VREF und der Strombegrenzung. Zum Beispiel für 100 kΩ zwischen VREF und GND, der Strom wird auf ca. 16 A abgesenkt. Bei besonders niedrigen Einstellungen (gestrichelte Linie) ist die Strombegrenzung ungenauer.
Der Controller kann verschiedene Fehler erkennen, die durch Setzen des FLT-Pins auf den niedrigen Zustand signalisiert werden. Um es zu verwenden, muss es mit dem High-Zustand (Systemlogikspannung) verbunden werden. Ein Kurzschluss an den Ausgängen, zu niedrige Spannung und Überhitzung können erkannt werden. Alle Fehler schalten die Motorausgänge ab, sperren sie jedoch nicht, was bedeutet, dass die Steuerung versucht, den Betrieb wieder aufzunehmen, wenn der Fehler behoben ist.
Der Controller kann kurzzeitig große Stromstöße verarbeiten (100 A für einige Millisekunden). Im Dauerbetrieb verträgt er 17 A, dies hängt jedoch von äußeren Bedingungen wie Umgebungstemperatur und Motorkühlung ab. Ein Kühlkörper kann der Platine hinzugefügt werden, um die Leistung zu verbessern.
Der Regler hat keine automatische Abschaltung bei Überhitzung. Es sollte darauf geachtet werden, Schäden am System zu vermeiden.
Video, das den Betrieb der H-Brücke beschreibt - Treiber von Gleichstrommotoren.
| Name |
Spannung Energie |
Strom kontinuierlich |
|---|---|---|
| G2 High-Power 18v25 | 30 V | 25 A. |
| G2 High-Power 18v17 | 30 V | 17 A. |
| G2 High-Power 24v21 | 40 V | 21A. |
| G2 High-Power 24v13 | 40 V | 13 A. |
Nützliche Links |
| Stromspannung aus | 6,5 V |
| Stromspannung Nieder | 30,0 V |
| Aktuelle Effizienz | 20,0 A |
| Anzahl der Kanäle | 1 |
| Niebezpieczne | Komponente |
| PAKETBREITE | 4.5 cm |
| PAKETHÖHE | 3.2 cm |
| PAKETTIEFE | 0.5 cm |
| PAKETGEWICHT | 0.009 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!
Produktinformation
Das Produkt ist eine Komponente, die für die weitere Montage/den Prototypenbau bestimmt ist. Es stellt kein eigenständiges fertiges Produkt im Sinne der Vorschriften über die Produktsicherheit dar.
Dane GPSR
Herkunftsland: der Vereinigten Staaten
Hersteller-Kontaktdaten: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin




