









































































































































































































SparkFun-Modul mit einem zweikanaligen Treiber für Gleichstrommotoren. Es wird mit einer Spannung von 2,7 V bis 15 V versorgt. Der Dauerstrom pro Kanal beträgt 1,2 A. Es hat gelötete Goldpin-Anschlüsse.
Die H-Bridge TB6612FNG ist eine effiziente Motorsteuerung in einem kleinen SSOP24-Gehäuse . Das Unternehmen SparkFun hat die Erwartungen der Benutzer erfüllt und ein Modul entwickelt, das den TB6612FNG -Chip und passive Komponenten enthält, die für den ordnungsgemäßen Betrieb erforderlich sind.
Das Produkt ist mit Arduino kompatibel Der Hersteller hat eine Bedienungsanleitung mit einem Programm für Arduino- Benutzer vorbereitet. |
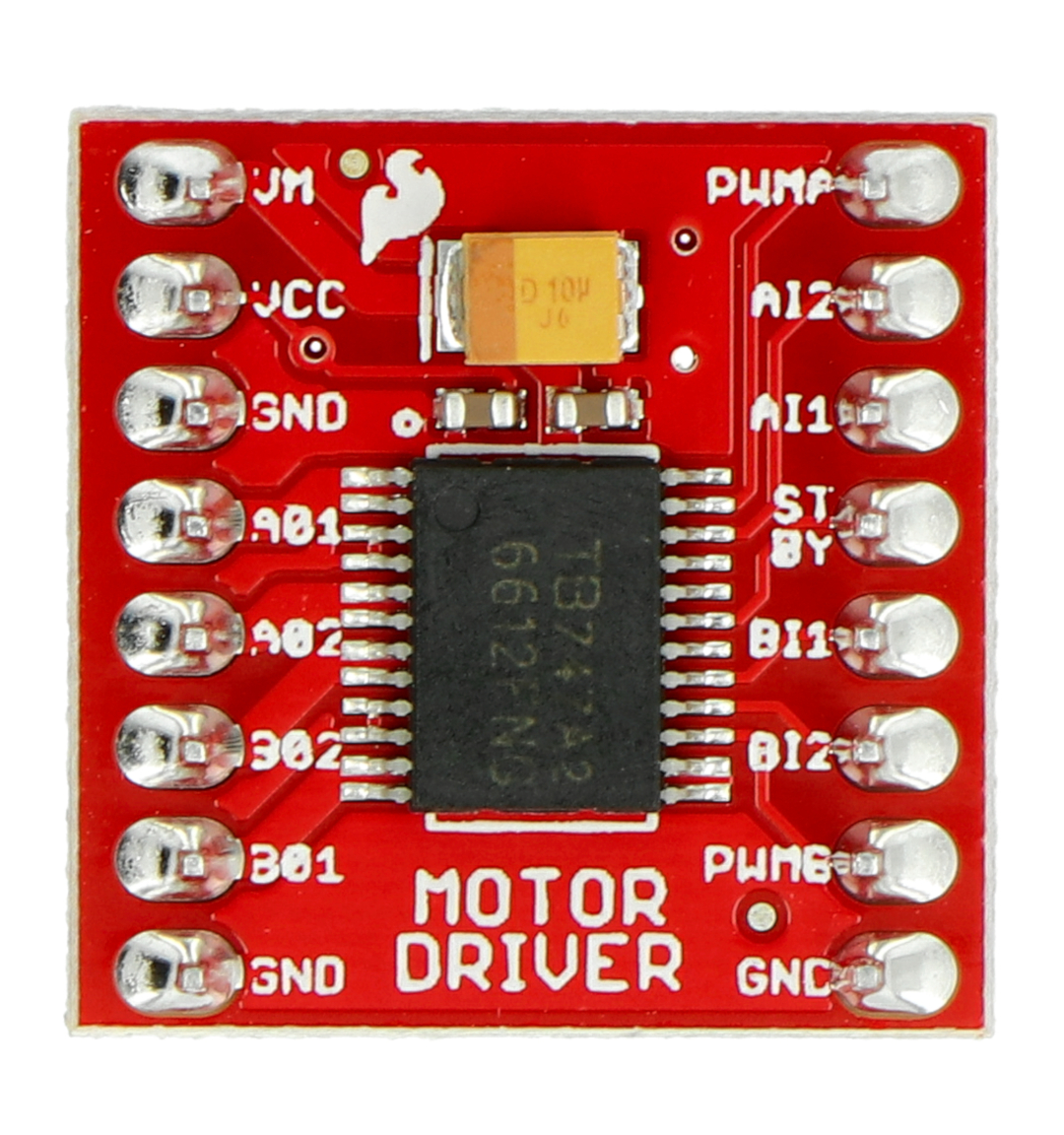
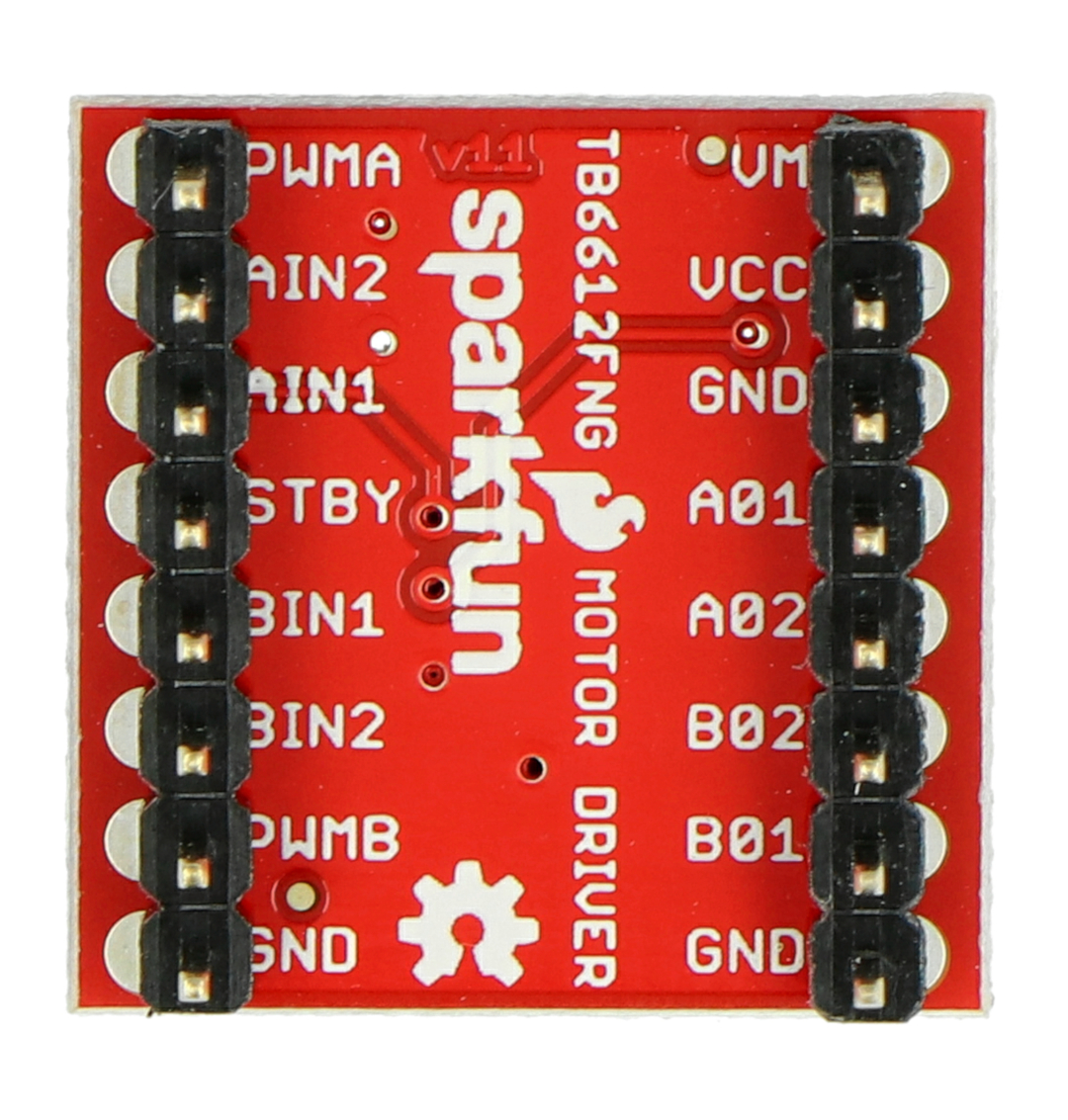
Die Signale wurden auf herkömmliche Pins (2,54 mm Raster) herausgeführt. Das Modul kann in das Steckbrett gesteckt oder über Kabel angeschlossen werden.
| Stift | Beschreibung |
|---|---|
| VCC | Stromversorgung des logischen Teils. |
| VMOT | Stromversorgung für Motoren. |
| Masse | Masse. |
| A01 A02 | Ausgänge von Kanal A. |
| B01 B02 | Ausgänge von Kanal B |
| PWMA | Kanal A PWM-Signal. |
| PWMB | PWM-Signal von Kanal B |
| STBY | Ziehen Sie an VCC, um das System einzuschalten. Der niedrige Zustand (Standard) versetzt das System in den Ruhezustand (niedriger Stromverbrauch). |
| AIN1, AIN2 | Richtungssteuerung von Kanal A. |
| BIN1, BIN2 | Richtungssteuerung von Kanal B. |
Alle Logiksignale werden intern auf Masse gezogen. Die maximale PWM-Frequenz beträgt 100 kHz.
AIN1 | AIN2 | PWMA PWMB | Ausgänge Motoren |
|---|---|---|---|
Zustand | Zustand niedrig | % füllen (nicht null) | Der Motor dreht mit seiner durch pwm (ungleich 0) vorgegebenen Maximaldrehzahl im Uhrzeigersinn. |
| Zustand niedrig | Zustand hoch | % füllen (nicht null) | Der Motor dreht mit der per PWM eingestellten Maximaldrehzahl (nicht 0) gegen den Uhrzeigersinn. |
| Zustand niedrig | Zustand niedrig | ohne Bedeutung | freies Bremsen (sanfter Stopp) |
| Zustand hoch | Zustand hoch | ohne | freies Bremsen (sanfter Stopp) |
| ohne Bedeutung | ohne Bedeutung | niedriger Zustand 0% Füllung | Plötzliches Bremsen |
Das TB6612-System kann als Steuerung für Pololu-Mikromotoren verwendet werden. Wenn die Motoren abgewürgt werden sollen, wird empfohlen, die Kanäle für eine höhere Stromausbeute zusammenzuführen. Verbinden Sie dazu folgende Ausgänge:
Video, das den Betrieb der H-Brücke beschreibt - Treiber von Gleichstrommotoren.
Nützliche Links |
| Stromspannung aus | 2,7 V |
| Stromspannung Nieder | 15,0 V |
| Aktuelle Effizienz | 1,2 A. |
| Anzahl der Kanäle | 2 |
| PAKETBREITE | 5 cm |
| PAKETHÖHE | 1.1 cm |
| PAKETTIEFE | 8 cm |
| PAKETGEWICHT | 0.003 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!

Herkunftsland: der Vereinigten Staaten
Hersteller-Kontaktdaten: SparkFun Electronics 6333 Dry Creek Pkwy, Niwot, CO 80503, Stany Zjednoczone
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin
Anweisungen und Dokumente

