



























































































































































































































































































Sensor zur Messung der Winkelgeschwindigkeit in drei Achsen. Es arbeitet im Bereich von: bis zu ± 240 ° / s, ± 500 ° / s oder ± 2000 ° / s. Es kommuniziert über den I2C- oder SPI-Bus, hat einen Spannungsregler, wird mit einer Spannung von 2,5 V bis 5 V versorgt.
Das Modul ist mit einem Gyroskop L3GD20H ausgestattet, das zur Messung der Winkelgeschwindigkeit in drei Achsen X, Y, Z dient. Es besteht die Möglichkeit, den Messbereich aus folgenden Optionen auszuwählen: ± 245 ° / s, ± 500 ° / s oder ± 2000 ° / s. Für den Bedienkomfort sorgt der integrierte LDO-Regler, dank dessen das System mit einer Spannung im Bereich von 2,5 bis 5,5 V betrieben werden kann. In der Praxis bedeutet dies, dass es sowohl mit 3,3 V (z. B. Raspberry Pi ) als auch mit 3,3 V funktioniert 5-V-Systeme (z. B. Arduino Uno und Leonardo).
L3GD20H 3-Achsen-I2C-SPI-Digitalgyroskop.
|
Das Produkt ist mit Arduino kompatibel Der Hersteller hat auf GitHub eine Bibliothek bereitgestellt, um Arduino -Anwendern die Nutzung des Moduls zu erleichtern. |
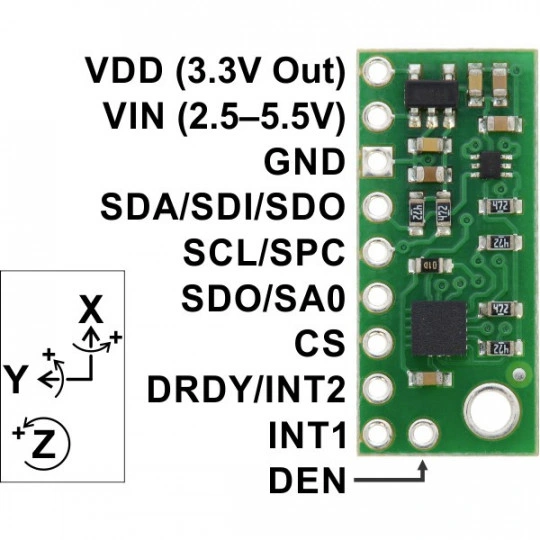
Die Pins des Moduls.
Der L3GD20H hat im Vergleich zur älteren Version des L3GD20 viele Verbesserungen eingeführt, von denen die wichtigsten sind: höhere Messgenauigkeit, geringerer Stromverbrauch und kürzere Startzeit. Der L3GD20H-Sensor ist mit einem DEN-Pin ausgestattet, der die Synchronisierung des Datenlesens mit einem externen Gerät ermöglicht. Beide Systeme haben die gleiche I2C-Busadresse, daher funktioniert der für die vorherige Version des L3GD20 geschriebene Code auch mit dem neuen L3GD20H. Das Gyroskop hat viele Konfigurationsoptionen, einschließlich der Möglichkeit zu wählen: Winkelgeschwindigkeitsempfindlichkeit, sieben verschiedene Baudraten, sieben FIFO-Puffermodi. Der Benutzer kann auch einen externen Interrupt einstellen und die I2C- oder SPI-Kommunikationsschnittstelle auswählen.
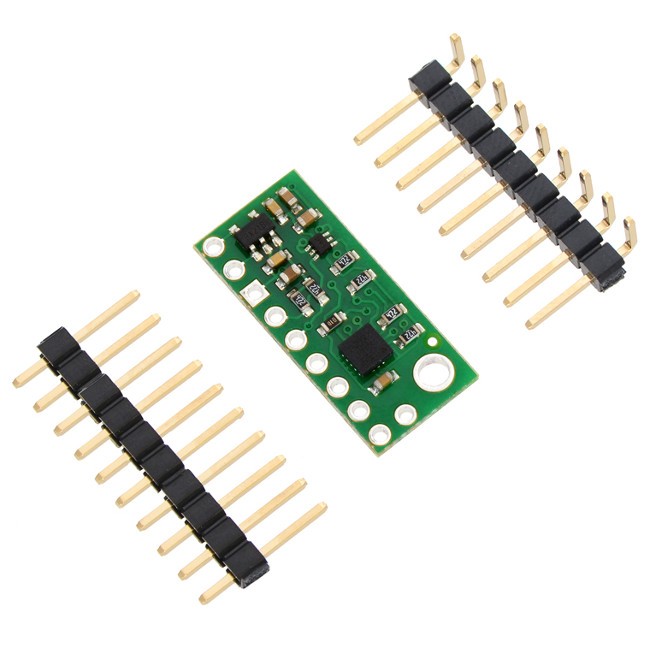
Der Sensor verfügt über zehn Pins zur Montage von Goldpin-Steckern - 2,54 mm Raster (im Lieferumfang enthalten).
| STIFT | Beschreibung |
|---|---|
| Fahrgestellnummer | Versorgungsspannung: 2,5 V - 5,5 V. Der Spannungswandler setzt den High-Zustand der SCL- und SDA-Pins auf diesen Wert. |
| Masse | Massepotential des Systems. |
| VDD | Reglerausgang 3,3 V mit einer maximalen Kapazität von 150 mA. |
| SCL/SPC | Die I2C / SPI-Taktleitung, verbunden über einen Spannungswandler. Der High-Zustand entspricht der VIN-Spannung, Low ist 0 V. |
| SDA/SDI | I2C-Datenleitung / SPI-Eingang, verbunden über einen Spannungswandler. Der High-Zustand entspricht der VIN-Spannung, Low ist 0 V. |
| SDO | SPI-Eingangsdatenleitung, die auch zum Ändern der Adresse des I2C-Busses verwendet wird. Dieser Pin hat keinen Spannungsregler, er verträgt nur eine Spannung von 3,3 V. |
| CS | Pin, der das Einschalten des SPI-Busses durch Angabe eines niedrigen Zustands ermöglicht. Standardmäßig auf 3,3 V hochgezogen - I2C-Schnittstelle eingeschaltet. Dieser Pin hat keinen Spannungsregler, er verträgt nur eine Spannung von 3,3 V. |
| DRDY / INT2 | Daten lesebereit / FIFO-Abbruch. Dieser Pin hat keinen Spannungsregler, er verträgt nur eine Spannung von 3,3 V. |
| INT1 | Konfigurierbarer Interrupt. Dieser Pin hat keinen Spannungsregler, er verträgt nur eine Spannung von 3,3 V. |
| DEN | Messdatenfreigabe. Dieser Pin hat keinen Spannungsregler, er verträgt nur eine Spannung von 3,3 V. |
Hier sind einige Informationen, die Sie kennen sollten, bevor Sie den Sensor anschließen:
Die Wahl der Kommunikationsschnittstelle erfolgt durch Setzen des entsprechenden logischen Zustands am CS-Pin, der intern auf 3,3 V hochgezogen wird. Das bedeutet, dass das System standardmäßig über den I2C-Bus kommuniziert. Um die SPI-Option auszuwählen, schließen Sie den CS-Pin an Masse kurz.
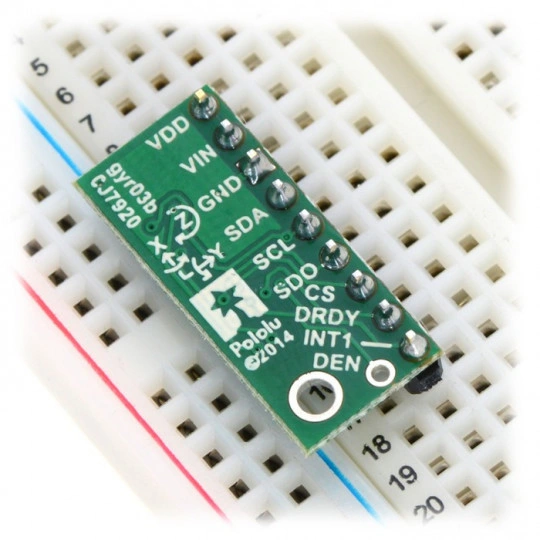
Der Abstand der Stifte stimmt mit der Kontaktplatte überein.
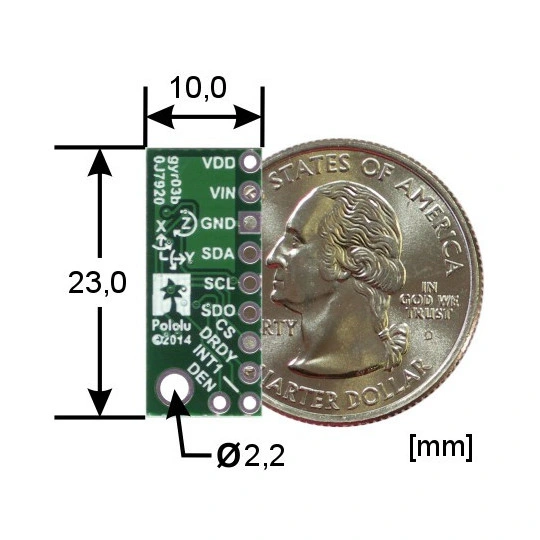
L3GD20H 3-Achsen-Digitalgyroskop von Pololu.
Der Chip hat eine 7-Bit-Adresse, deren letztes Bit (LSB) per SDO-Ausgang konfigurierbar ist. Standardmäßig wird das SDO über einen 4,7-kΩ-Widerstand auf VCC hochgezogen, wodurch die Adresse auf 1101011b gesetzt wird. Bei einem Konflikt mit einem anderen Gerät kann die Adresse geändert werden, indem das SDO mit Masse verbunden wird. Dadurch ändert sich das letzte Bit des LSB auf den Wert 0. Details zur Übertragung und Beschreibung der Register finden Sie in der Dokumentation des Systems .
Der Hersteller gibt an, dass die Schaltung bei 400 kHz (I2C Fast Mode) einwandfrei funktioniert. Oberhalb dieses Wertes können Übertragungsstörungen auftreten.
Um die Kommunikation über SPI auszuwählen, verbinden Sie den CS-Pin mit Masse und setzen Sie ihn nach Abschluss der Übertragung wieder auf High. Eine detaillierte Beschreibung der Übertragung und die Liste der Konfigurationsregister finden Sie in der Systemdokumentation .
Nützliche Links
|
| Niebezpieczne | Komponente |
| PAKETBREITE | 7.5 cm |
| PAKETHÖHE | 8.5 cm |
| PAKETTIEFE | 0.1 cm |
| PAKETGEWICHT | 0.003 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!
Produktinformation
Das Produkt ist eine Komponente, die für die weitere Montage/den Prototypenbau bestimmt ist. Es stellt kein eigenständiges fertiges Produkt im Sinne der Vorschriften über die Produktsicherheit dar.
Dane GPSR
Herkunftsland: der Vereinigten Staaten
Hersteller-Kontaktdaten: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin



