






































































































































































































Schrittmotortreiber - In Botland finden Sie einfach zu bedienende, stabile und präzise Treiber, die den Einsatz von Schrittmotoren in CNC-Geräten (einschließlich 3D-Druckern und Plottern), kleinen Projekten im Bereich Automatisierung, Robotik, Manipulatoren und Messen ermöglichen Geräte und wissenschaftliche Projekte und ... Spielzeug. Mit Treibern können Sie die Drehrichtung und -geschwindigkeit des Motors sowie die Auflösung (Mikroschrittgröße) steuern . Auch zum Anschluss der Motoren gibt die Website genaue Hinweise. Dank ihnen wird die Steuerung eines Schrittmotors sehr einfach. Wir laden Sie in den Laden ein!

- Neu
- Kostenloser Versand

- Neu
- Kostenloser Versand

- Neu
- Kostenloser Versand

- Neu
- Kostenloser Versand

- Reduziert
- Kostenloser Versand
- Sonderangebot

PC-Workbench-Auflage für Creality Sermoon D3 - 320x283mm
Index: CRL-24874
- Ausverkauf
- Kostenloser Versand
- Sonderangebot

LED Pailletten - LEDs - Rose Pink - 5Stk. - Adafruit 1792
Index: ADA-23544
- Reduziert
- Kostenloser Versand
- Sonderangebot
- Reduziert
- Kostenloser Versand
- Sonderangebot

- Reduziert
- Kostenloser Versand
- Sonderangebot

Polymaker PolySmooth PVB-Filament 1,75 mm, 0,75 kg - Orange
Index: PLM-22746
- Ausverkauf
- Kostenloser Versand
- Sonderangebot
- Reduziert
- Kostenloser Versand
- Sonderangebot
- Ausverkauf
- Kostenloser Versand
- Sonderangebot
- Ausverkauf
- Kostenloser Versand
- Sonderangebot

- Ausverkauf
- Kostenloser Versand
- Sonderangebot

Creality 24V 40x40x10mm Trommellüfter für Ender 3
Index: CRL-15768
- Ausverkauf
- Kostenloser Versand
- Sonderangebot

Schrittmotor-Steuerungen
Wird geladen...

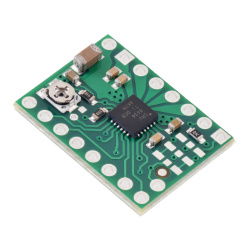
MP6500 - Schrittmotortreiber 35V / 2,5A - mit analoger Stromregelung - montiert - Pololu 2967
Schrittmotortreiber basierend auf dem MP6500-System. Es wird mit einer Spannung im Bereich von 4,5 V bis 35 V betrieben, bei einer maximalen Stromaufnahme von 2,5 A pro Spule....
Index: PLL-12844
Index: PLL-12844
- Kostenloser Versand
DFRobot - Vierkanal-5,5-V-/1,5-A-Motortreiber für BBC-Mikro: Bit
Schild für Mikro: Bit , mit dem Sie vier Gleichstrommotoren , zwei Schrittmotoren und acht Servos (5,5 V / 1,5 A) steuern können. Außerdem verfügt das Modul über 9 Pins...
Index: DFR-12359
Index: DFR-12359
- Kostenloser Versand

Schrittmotortreiber DRV8834 Niederspannung 10,8 V 2 A - Pololu 2134
Der auf dem DRV8834-System basierende Schrittmotortreiber ermöglicht es Ihnen, den Motor mit einer Stromaufnahme von bis zu 1,5 A (kurzzeitig bis zu 2 A) pro Spule zu steuern,...
Index: PLL-01418
Index: PLL-01418
- Kostenloser Versand
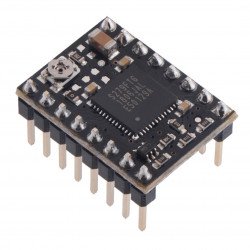
DRV8825 - Schrittmotortreiber 45 V / 2,2 A - Pololu 2133
Der Schrittmotortreiber auf Basis des DRV8825 -Systems ermöglicht die Ansteuerung des Motors mit einer Stromaufnahme von bis zu 1,5 A (mit Kühlung bis zu 2,2 A) pro Spule...
Index: PLL-01324
Index: PLL-01324
- Kostenloser Versand

TB6612 - Zweikanaltreiber für 13,5 V / 1,2 A-Motoren mit Anschlüssen - Adafruit 2448
Zweikanaliges Motorsteuergerät basierend auf dem TB6612FNG -System . Die Versorgungsspannung der Motoren beträgt 4,5 V bis 13,5 V , während die logische Spannung im...
Index: ADA-15916
Index: ADA-15916
- Kostenloser Versand

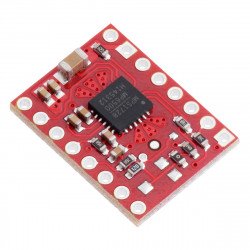
MP6500 - Schrittmotortreiber 35V / 2,5A - mit analoger Stromregelung - Pololu 2966
Schrittmotortreiber basierend auf dem MP6500-System . Es wird mit einer Spannung im Bereich von 4,5 - 35 V betrieben, mit einer maximalen Stromaufnahme von 2,5 A pro Spule....
Index: PLL-10881
Index: PLL-10881
- Kostenloser Versand
DRV8434S Schrittmotortreiber 48V/2A SPI - Pololu 3768
Schrittmotor-Treibermodul basierend auf dem DRV8434S-Chip von Texas Instruments. Es wird mit einer Spannung im Bereich von 4,5 V bis 48 V betrieben. Es bietet eine breite...
Index: PLL-22219
Index: PLL-22219
- Kostenloser Versand
STSPIN220 - A4988 Schrittmotortreiber 45 V / 1,3 A - Pololu 2876
Schrittmotortreiber mit einer Spannung von 1,8 V bis 10 V. Maximale Auflösung: 1/256 koku. Es kann ohne die Verwendung eines Kühlkörpers oder Zwangsluftstroms bei 1,1 A pro...
Index: PLL-13822
Index: PLL-13822
- Kostenloser Versand
DRV8434 Schrittmotortreiber 48V/2A - mit Stiftleisten - Pololu 3763
Schrittmotor-Treibermodul mit DRV8434-Chip von Texas Instruments, mit Stiftleisten für den Anschluss an einen 16-poligen Sockel oder eine Kontaktplatine ohne Löten. Es...
Index: PLL-24068
Index: PLL-24068
- Kostenloser Versand
Grove – PCA9685 – 16-Kanal-12-Bit-PWM-I2C-Servotreiber
16-Kanal-PWM-Generator, nützlich, wenn die Mikrocontroller-Ausgänge fehlen. Es ermöglicht unter anderem: das Steuern von Servos, das Anpassen der Geschwindigkeit von Motoren...
Index: SEE-13511
Index: SEE-13511
- Kostenloser Versand

Tic T249 - Schrittmotortreiber USB 47V / 4,5A - Pololu 3139
Schrittmotortreiber basierend auf dem TB67S249FTG -System. Es wird mit einer Spannung im Bereich von 10 - 47 V betrieben, mit einer maximalen Stromaufnahme von 4,5 A pro...
Index: PLL-13821
Index: PLL-13821
- Kostenloser Versand

Grove - L298N - Zweikanaltreiber für 15V / 1A Motoren
Das Modul aus der Grove-Serie ist mit einer zweikanaligen H L298N-Brücke ausgestattet, die von ATmege 8L gesteuert wird. Mit dem System können Sie die Drehrichtung von...
Index: SEE-11320
Index: SEE-11320
- Kostenloser Versand
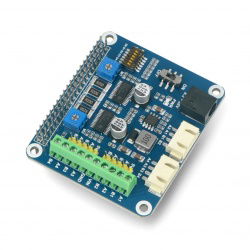
Schrittmotor HAT - 28 V / 2,5 A Zweikanal-Schrittmotortreiber für Raspberry Pi - Waveshare 15669
Shield für Rasberry Pi, ausgestattet mit dem DRV8825-System, ermöglicht die Steuerung von zwei Schrittmotoren mit einer Schrittauflösung von bis zu 1/32. Es funktioniert mit...
Index: WSR-13513
Index: WSR-13513
- Kostenloser Versand

Grove - L298P - Zweikanal-Treiber für 12V / 2A-Motoren - Seeedstudio 105020093
L298P -Motortreibermodul, das zwei Gleichstrommotoren oder einen Schrittmotor unterstützt. Die vom Treiber unterstützte Spannung beträgt 6 V bis 12 V , und der Dauerstrom...
Index: SEE-16906
Index: SEE-16906
- Kostenloser Versand
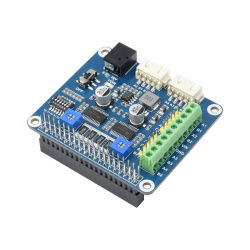
Zweikanaliger Schrittmotortreiber von Waveshare in Form eines HAT-Shields für den Raspberry Pi. Der Controller basiert auf zwei HR8825- Systemen, er arbeitet mit einer...
Index: WSR-21705
Index: WSR-21705
- Kostenloser Versand
DRV8434 Schrittmotortreiber 48V/2A - Pololu 3762
Ein Schrittmotor-Treibermodul auf der Basis des DRV8434-Chips von Texas Instruments. Es bietet eine breite Palette von Schrittauflösungen von Voll- bis 1/256-Schritten und...
Index: PLL-24067
Index: PLL-24067
- Kostenloser Versand

A4988 Schwarz - RepRap 35V / 2A Schrittmotortreiber - Pololu 2128
Schrittmotortreiber basierend auf dem A4988-System. Es wird mit einer Spannung im Bereich von 8 - 35 V betrieben, mit einer maximalen Stromaufnahme von 2 A pro Spule. Maximale...
Index: PLL-02000
Index: PLL-02000
- Kostenloser Versand
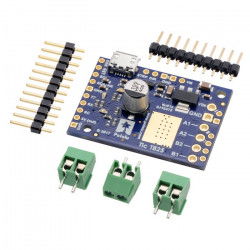
Tic T825 - Schrittmotortreiber USB 45V / 2,5A - Pololu 3131
Der Schrittmotortreiber hat den TI DRV8825 Treiber. Es wird mit einer Spannung im Bereich von 8,5 - 45 V betrieben, mit einer maximalen Stromaufnahme von 2,5 A pro...
Index: PLL-09467
Index: PLL-09467
- Kostenloser Versand

Tic T825 - USB 45V / 2,5A Schrittmotortreiber - montiert - Pololu 3130
Der Schrittmotortreiber hat den TI DRV8825 Treiber . Es wird mit einer Spannung im Bereich von 8,5 - 45 V betrieben, mit einer maximalen Stromaufnahme von 2,5 A pro...
Index: PLL-09468
Index: PLL-09468
- Kostenloser Versand

Tic T834 - Schrittmotortreiber USB 10,8 V / 2 A - Pololu 3132
Der Schrittmotortreiber hat den TI DRV8834 Treiber. Es wird mit einer Spannung im Bereich von 2,5 - 10,8 V betrieben, mit einer maximalen Stromaufnahme von 2 A pro Spule....
Index: PLL-10200
Index: PLL-10200
- Kostenloser Versand
MP6500 - Schrittmotortreiber 35V / 2A - mit digitaler Stromregelung - Pololu 2968
Schrittmotortreiber basierend auf dem MP6500-System . Es wird mit einer Spannung im Bereich von 4,5 - 35 V betrieben, mit einer maximalen Stromaufnahme von 2 A pro Spule....
Index: PLL-10880
Index: PLL-10880
- Kostenloser Versand
TB67S249FTG - Schrittmotortreiber 47V / 1,6A - mit Anschlüssen - Pololu 3097
Schrittmotortreiber basierend auf dem TB67S279FTG-System. Es wird mit einer Spannung im Bereich von 10 - 47 V betrieben, mit einer maximalen Stromaufnahme von 4,5 A pro...
Index: PLL-13680
Index: PLL-13680
- Kostenloser Versand

Tic T249 - USB 47V /4,5A Schrittmotortreiber - montiert - Pololu 3138
Schrittmotortreiber basierend auf dem TB67S249FTG -System. Es wird mit einer Spannung im Bereich von 10 - 47 V betrieben, mit einer maximalen Stromaufnahme von 4,5 A pro...
Index: PLL-13959
Index: PLL-13959
- Kostenloser Versand

36v4 - Hochleistungs-Schrittmotortreiber 50 V / 6 A - Pololu 3730
Der auf dem DRV8711-System basierende Schrittmotortreiber ermöglicht die Ansteuerung eines bipolaren Schrittmotors. Es wird mit einer Spannung von 8 V bis 50 V...
Index: PLL-14787
Index: PLL-14787
- Kostenloser Versand
So wählen Sie einen Treiber für einen Schrittmotor aus
Mit den von Botland-Store-Spezialisten ausgewählten Schrittmotortreibern können Sie den Betrieb eines oder mehrerer Motoren, bi- oder unipolar, präzise steuern, indem Sie Signale von jedem System verwenden, das logische Zustände erzeugt , wie zum Beispiel: Arduino , Raspberry Pi , STM32Discovery oder Mikrocontroller. Dank ihnen ist die Steuerung von Schrittmotoren präzise und intuitiv. Der Schrittmotor kann mit unterschiedlichen Spannungswerten betrieben werden. Lesen Sie daher vor der Auswahl eines bestimmten Modells dessen Spezifikationen.
Bei einigen Modellen können Sie gleichzeitig Gleichstrommotoren, Schrittmotoren und Servomechanismen sowie Sensoren, ein LCD-Display, einen Speicherkartenleser oder ein Bluetooth-Modul anschließen, wodurch Sie komplexere Projekte erstellen können. Andere erfordern die Verwendung eines Kühlkörpers, um die Temperatur zu stabilisieren.
Das Standardsystem besteht aus einem Controller, der Impulssignale vom Logikgeneratorsystem aufnimmt und sie in ein Signal umwandelt, das den Motorwicklungen zugeführt wird.
Der Schrittmotor selbst wandelt das elektrische Impulssignal der Steuerung in einen Bewegungsablauf um. Die Drehrichtung wird durch die Art der zugeführten Impulse bestimmt, die Drehgeschwindigkeit hängt von der Impulsfrequenz und die Anzahl der Mikroschritte von der Anzahl der Impulse ab.
So wählen Sie einen Schrittmotortreiber aus – Strom
Die Bewegung des Motors resultiert aus den Wechselwirkungen zwischen dem Permanentmagneten des Stators und dem variablen Magnetfeld, das wiederum direkt proportional zum in den Wicklungen fließenden Strom ist. Daher sollten Sie bei der Auswahl eines Controllers zunächst den von den Spulen aufgenommenen Strom berücksichtigen.
Der Regler sollte über eine Strombelastbarkeit verfügen, die dem Nennwert des Motors entspricht. Dieser Wert sollte nicht mehr als ± 5 % vom Motorstrom abweichen.
Bei vielen im Botland-Shop erhältlichen Controllern ist es möglich, die maximale Stromaufnahme des Schrittmotors mithilfe eines Potentiometers auf der Platine zu begrenzen .
Außerdem ist zu bedenken, dass Schrittmotoren ständig arbeiten und in der Positionshaltephase den meisten Strom verbrauchen, was wiederum zu einer Erwärmung des Motors führt. Daher kann es erforderlich sein, einen geeigneten Kühlkörper zu verwenden, um Schäden an der Steuerung und dem Motor zu vermeiden.
So wählen Sie einen Schrittmotortreiber aus – Spannung
Bei der Auswahl eines Reglers mit einem bestimmten Spannungsbereich sollte man vor allem das Drehmoment (Leistung) des Motors berücksichtigen, das direkt von der Impulsanstiegsgeschwindigkeit (also von der Versorgungsspannung) und der Spannungsfestigkeit des Reglers abhängt vom Motor erzeugte elektromotorische Kraft.
Durch die hohe Versorgungsspannung des Reglers kann der Strom in den Spulen schnell ansteigen. Eine höhere Spannung bedeutet eine höhere Motordynamik, und eine Verringerung der Spannung führt zu einer Verschlechterung der Motordynamik und -geschwindigkeit.
Die Spannungsfestigkeit des Reglers gegenüber der vom Motor erzeugten elektromotorischen Kraft (EMK) ist wiederum entscheidend für den störungsfreien Betrieb des Systems. Glücklicherweise geben Motorenhersteller den EMK-Wert im Verhältnis zur Drehzahl an, was die Auswahl des passenden Reglers sehr einfach macht. Die Position der Motorwelle hängt auch von der Funktionsweise des Reglers ab.
Weitere Informationen zu Schrittmotoren und Treibern finden Sie in unserem Ratgeber Alles rund um Schrittmotoren,
Schrittmotortreiber – FAQ
Bei der Auswahl eines Schrittmotortreibers lohnt es sich, darauf zu achten, dass dieser hinsichtlich Strom und Spannung mit dem Gerät kompatibel ist. Mit einigen Steuerungen können Sie mehr als einen Schrittmotor sowie Gleichstrommotoren , Servomechanismen, Sensoren und andere Systeme anschließen.
Mit dem Schrittmotortreiber können Sie das dem System zugeführte elektrische Signal (hauptsächlich Spannung) steuern. Basierend auf der Anzahl und Frequenz der an den Motor gesendeten Impulse ist es möglich, seinen Betrieb zu steuern.
Nach dem physischen Anschluss des Schrittmotors an die Steuerung werden die Parameter des dem Motor zugeführten Signals eingestellt, die den Betrieb des Systems bestimmen. Mehr erfahren Sie in unserem Artikel „ Schrittmotoren – wie funktioniert das?“ ".
Die Aufteilung der Schritte hängt von der Motorsteuerungsmethode ab. Bei der Vollschrittregelung ist die kleinstmögliche Teilung die vom Hersteller angegebene Nennteilung. Mit der Halbschritt- und Mikroschrittsteuerung ist es jedoch möglich, nahezu jede Schrittteilung zu erreichen.