











































































































































































































Das Schrittmotortreibermodul auf Basis des DRV8434-Chips von Texas Instruments ermöglicht die Ansteuerung eines Schrittmotors mit einer maximalen Stromaufnahme von bis zu 2 A pro Spule und einer Versorgungsspannung von 4,5 V bis 48 V. Er bietet verschiedene Schrittauflösungen, von Vollschritt bis 1/256 Schritt. Unterstützt sechs Fade-Modi, darunter zwei intelligente Stromregelungsmodi, die glatte Schritte ohne manuelle Einstellung ermöglichen. Die Stromregelung über ein integriertes Potentiometer ermöglicht die Verwendung von Spannungen, die höher als die Nennwerte sind, und damit höhere Schrittgeschwindigkeiten. Dank des integrierten Spannungsreglers ist keine zusätzliche Spannungsversorgung für den Logikteil erforderlich. Das Modul hat die gleiche Größe und Pinbelegung wie der A4988-Controller, so dass dieser in vielen Anwendungen direkt ersetzt werden kann.
Wir bieten auch Schrittmotortreiber mit anderen Betriebsparametern an.
DRV8434 Schrittmotortreiber 48 V / 2 A - Pololu 3762.
Schrittmotortreibermodul basierend auf dem DRV8434-Chip.
Der Controller benötigt eine Motorversorgungsspannung von 4,5 V bis 48 V, die über VIN und GND angeschlossen werden muss. Beachten Sie, dass Versorgungsspannungen unter 6 V den maximal einstellbaren Strom begrenzen.
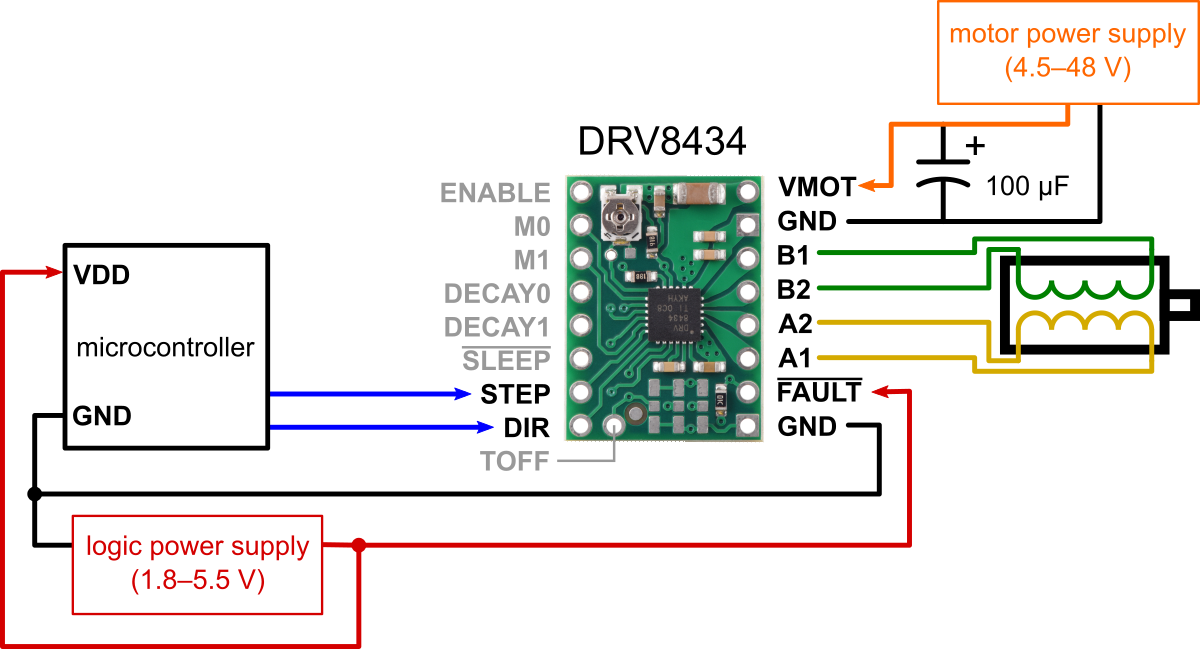
Schema des Mikrocontroller-Anschlusses an den Schrittmotor-Treiberträger DRV8434.
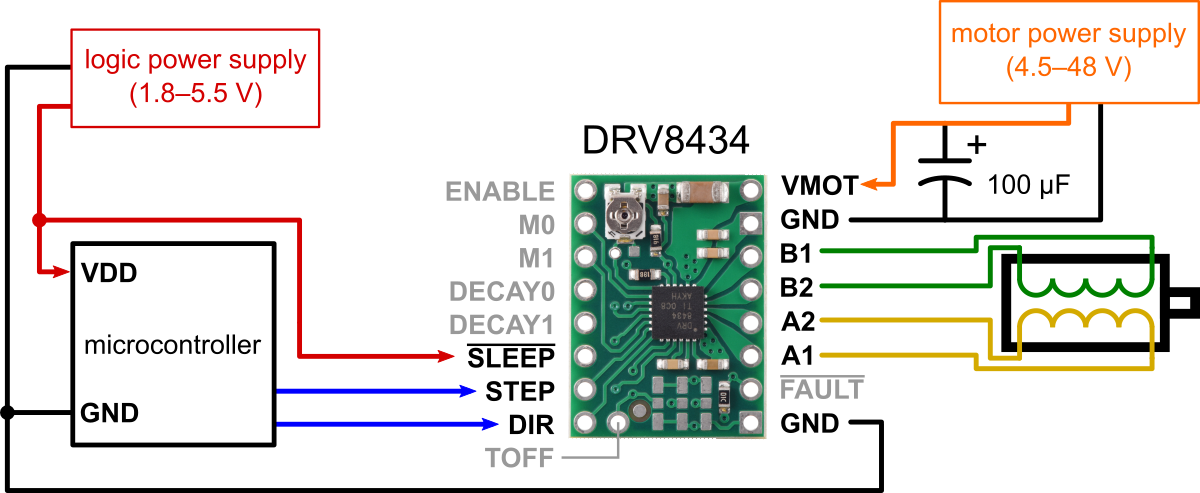
Die Schaltung verfügt über zwei Eingänge zur Steuerung der Stromversorgungszustände: SLEEP und ENABLE.
Die Schrittweite wird über die Eingänge M0 und M1 gewählt. Die Methode zur Erlangung der geeigneten Schrittauflösung ist in der nachstehenden Tabelle dargestellt.
| MODUS0 | BETRIEBSART1 | AUFLÖSUNG |
| Niedrig | Niedrig | Vollschritt mit 100% Strom |
| Hoch | 330 kΩ gegen GND | Voller Schritt mit 70% Strom |
| Hoch | Niedrig | Unvollständiger 1/2 Schritt |
| Hi-Z | Niedrig | 1/2 Stufe |
| Niedrig | Hoch | 1/4 Stufe |
| Hoch | Hoch | 1/8 Stufe |
| Hi-Z | Hoch | 1/16 Schritt |
| Niedrig | Hi-Z | 1/32 Schritt |
| Hi-Z | 330 kΩ gegen GND | 1/64-Schritt |
| Hi-Z | Hi-Z | 1/128 Schritt |
| Hoch | Hi-Z | 1/256 Schritt |
Die Strombegrenzung ist der Schlüssel zum Erreichen hoher Schrittgeschwindigkeiten, insbesondere wenn die Motorversorgung die Nennwerte überschreitet. Ein Standard-Schrittmotor kann beispielsweise einen maximalen Nennstrom von 1 A bei einem Spulenwiderstand von 5 Ω haben, was bedeutet, dass die maximale Motorversorgung 5 V beträgt. Mit einer höheren Spannung, z. B. 9 V, können höhere Schrittgeschwindigkeiten erreicht werden, aber es ist notwendig, den Strom aktiv unter 1 A zu begrenzen, um Schäden am Motor zu vermeiden.
Der Controller ermöglicht eine aktive Strombegrenzung durch Einstellen eines Potentiometers. Eine Möglichkeit, dies zu tun, besteht darin, den Regler auf Vollschrittbetrieb einzustellen und den durch eine Spule fließenden Strom zu messen, ohne ein Signal an den STEP-Eingang zu liefern.
Alternativ kann auch die Spannung am VREF-Pin gemessen und die Stromgrenze berechnet werden. Die Stromgrenze kann anhand der folgenden Formel berechnet werden:
Stromgrenze = VREF/1.32
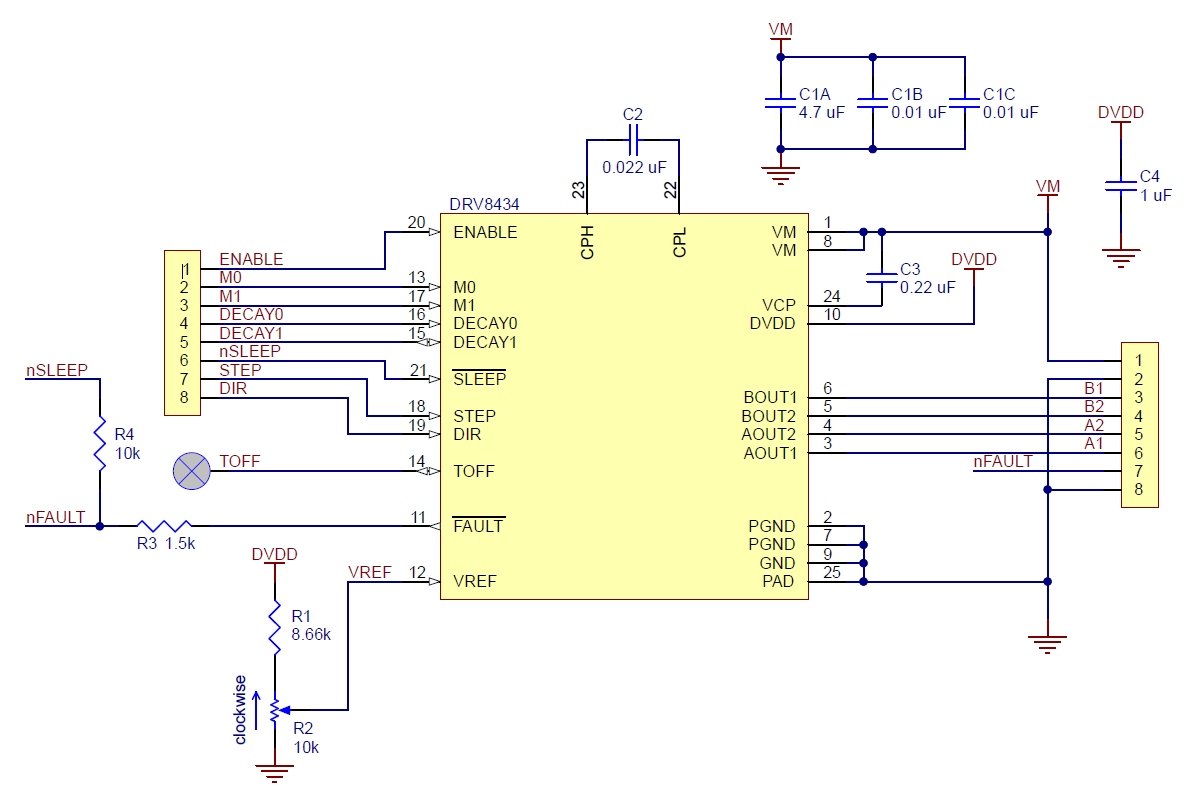
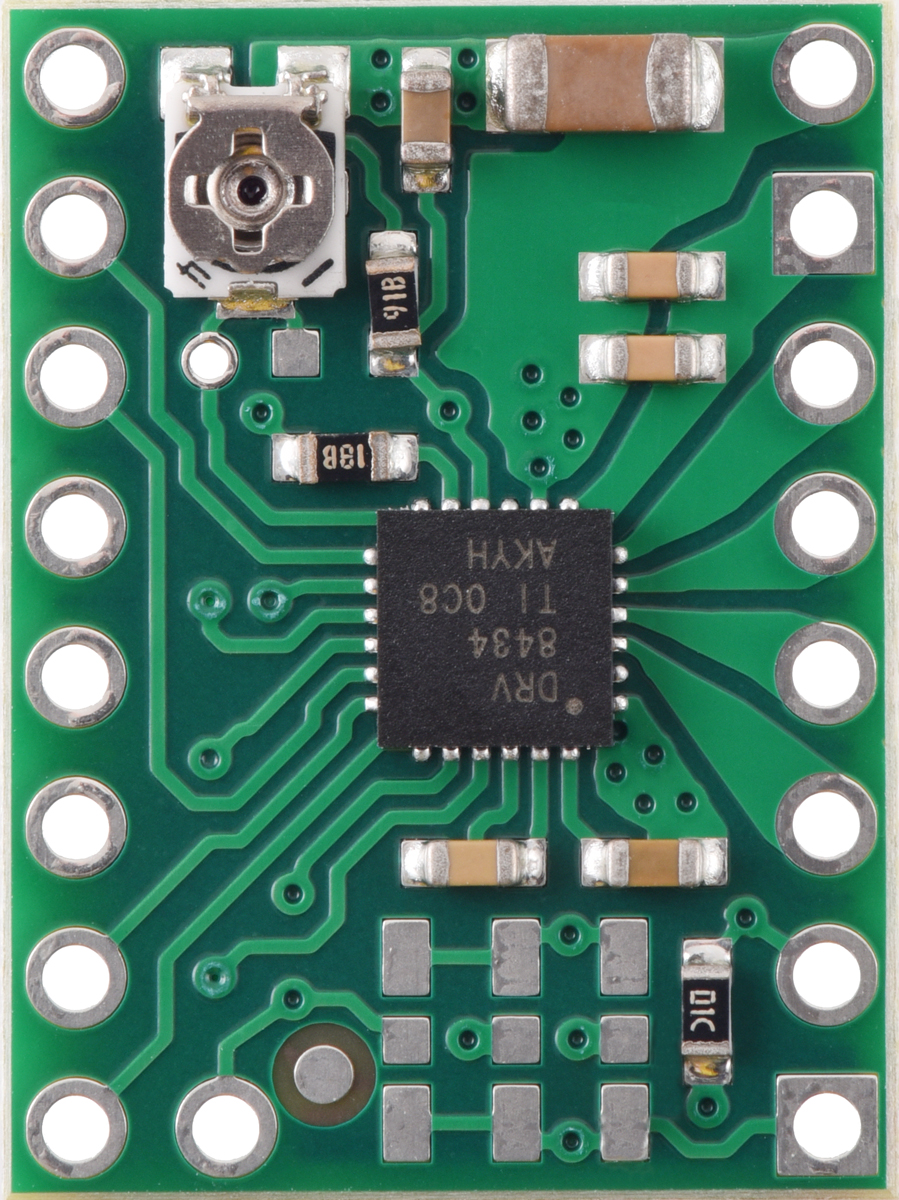
Schaltplan des Schrittmotortreibers DRV8434.
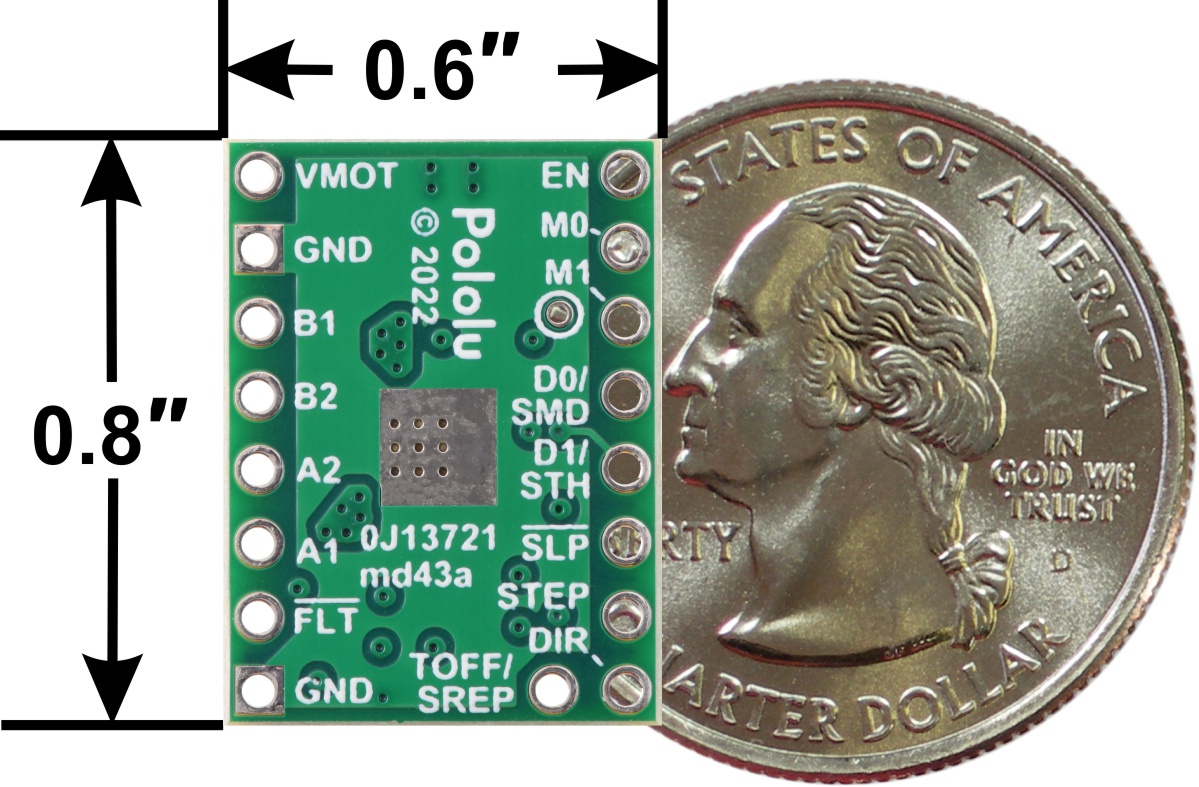
Die Größe und die Pinbelegung des Moduls sind mit dem A4988-Treiber kompatibel.
| Stromspannung aus | 4,5 V. |
| Stromspannung Nieder | 48,0 V |
| Aktuelle Effizienz | 1,2 A. |
| Anzahl der Kanäle | 1 |
| PAKETBREITE | 7.5 cm |
| PAKETHÖHE | 8.5 cm |
| PAKETTIEFE | 1 cm |
| PAKETGEWICHT | 0.003 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!
Herkunftsland: der Vereinigten Staaten
Hersteller-Kontaktdaten: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin
Anweisungen und Dokumente



