






















































































































































































































































































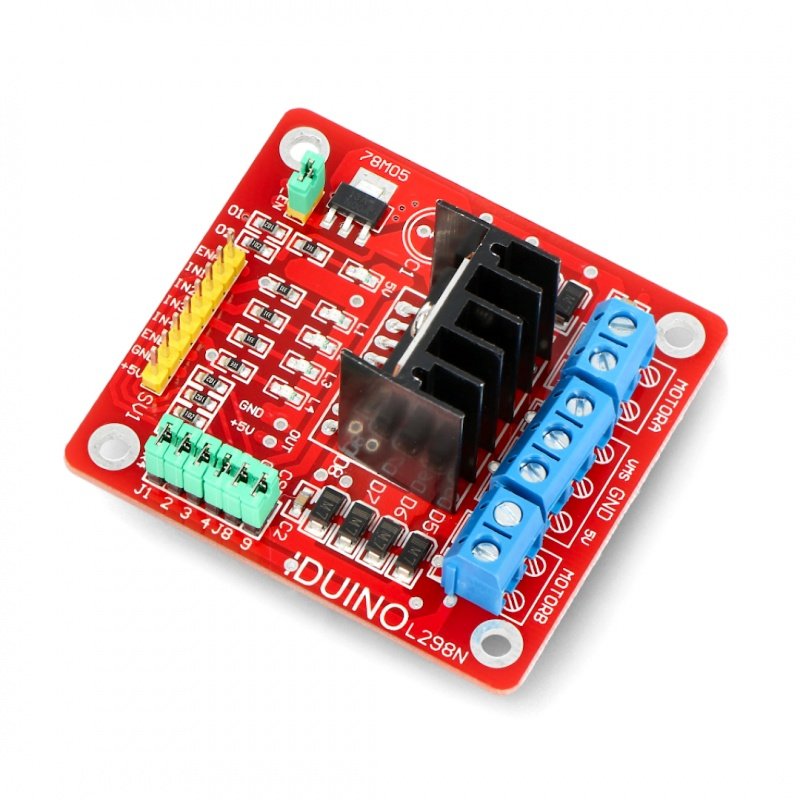




Modul mit einem zweikanaligen Treiber von DC-Motoren L298N. Es wird mit einer Spannung von 5 V bis 46 V versorgt. Der maximale Kanalstrom beträgt 2 A. Das System verfügt über einen eingebauten Spannungsregler 5 V zur Versorgung des logischen Teils.
Ein Modul mit dem beliebten L298N-Treiber, mit dem Sie die Drehrichtung und Geschwindigkeit von zwei Gleichstrommotoren steuern können. Dank der ARK-Schraubverbinder lassen sich das Netzteil und die Motoren selbst einfach anschließen, indem die Drähte mit einem Schraubendreher verschraubt werden. Die Steuersignale wurden an den gängigen Goldpin-Anschlüssen ausgegeben, wodurch Sie das System mit Inbetriebnahmeplatinen, z.B. mit Arduino , per Kabel verbinden können.
| Für Arduino-Anwender gibt es ein beispielhaftes Programm , das die Bedienung des Moduls erleichtert. |
 Zweikanal-Treiber für L298N-Motoren - Modul WB291111 - Iduino ST1112.
Zweikanal-Treiber für L298N-Motoren - Modul WB291111 - Iduino ST1112.
Video, das den Betrieb der H-Brücke beschreibt - Treiber von Gleichstrommotoren.
In unserem Angebot finden Sie auch den integrierten Schaltkreis L298 .

| Stift | Beschreibung |
|---|---|
| VMS | Die Versorgungsspannung von Motoren von 5 V bis 46 V. |
| 5V | Stromversorgung des logischen Teils hinter dem Stabilisator - aktiv nach Entfernen des 5-V-Jumpers. |
| Masse | Die Masse des Systems |
| MOTOR A |
Ausgänge des Motorkanals A. |
| MOTORB |
Ausgänge des Motorkanals B. |
| EAW | PWM-Signal zur Steuerung der Motordrehzahl A. |
| IN1, IN2 | Richtungssteuerung von Kanal A |
| ENB | PWM-Signal zur Steuerung der Drehzahl von Motor B. |
| IN3, IN4 | Richtungssteuerung von Kanal B |
|
IN1 / IN3 |
IN2 / IN4 |
Motorleistungen |
|---|---|---|
|
Zustand |
Zustand niedrig |
Der Motor dreht mit seiner durch pwm (ungleich 0) vorgegebenen Maximaldrehzahl im Uhrzeigersinn. |
| Zustand niedrig |
Zustand hoch |
Der Motor dreht mit der durch PWM eingestellten Maximaldrehzahl (nicht 0) gegen den Uhrzeigersinn. |
| Zustand niedrig |
Zustand niedrig |
Wenn der PWM-Eingang in den High-Zustand gegeben wird - schnelles Abbremsen der Motoren (Schnellstopp). |
| Zustand hoch |
Zustand hoch |
Wenn der PWM-Eingang in den High-Zustand gegeben wird - schnelles Abbremsen der Motoren (Schnellstopp). |
| Zustand hoch |
Zustand hoch |
Wenn Sie dem PWM-Eingang einen niedrigen Zustand geben - langsames Bremsen (sanfter Stopp). |
| Stromspannung aus | 5,0 V |
| Stromspannung Nieder | 46 V |
| Aktuelle Effizienz | 2 A. |
| Anzahl der Kanäle | 2 |
| Niebezpieczne | Komponente |
| PAKETBREITE | 5.8 cm |
| PAKETHÖHE | 6.5 cm |
| PAKETTIEFE | 3.5 cm |
| PAKETGEWICHT | 0.033 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!

Produktinformation
Das Produkt ist eine Komponente, die für die weitere Montage/den Prototypenbau bestimmt ist. Es stellt kein eigenständiges fertiges Produkt im Sinne der Vorschriften über die Produktsicherheit dar.
Dane GPSR
Herkunftsland: China
Hersteller-Kontaktdaten: OPEN SMART TECHNOLOGY LIMITED OPEN SMART TECHNOLOGY LIMITED SZ OFFICE: Rm1419 - 1422, Block C, SUNAC Intelligence Mansion, LongHua District, ShenZhen, GuangDong, China
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin







")


