





































































































































































































- Auslaufprodukt

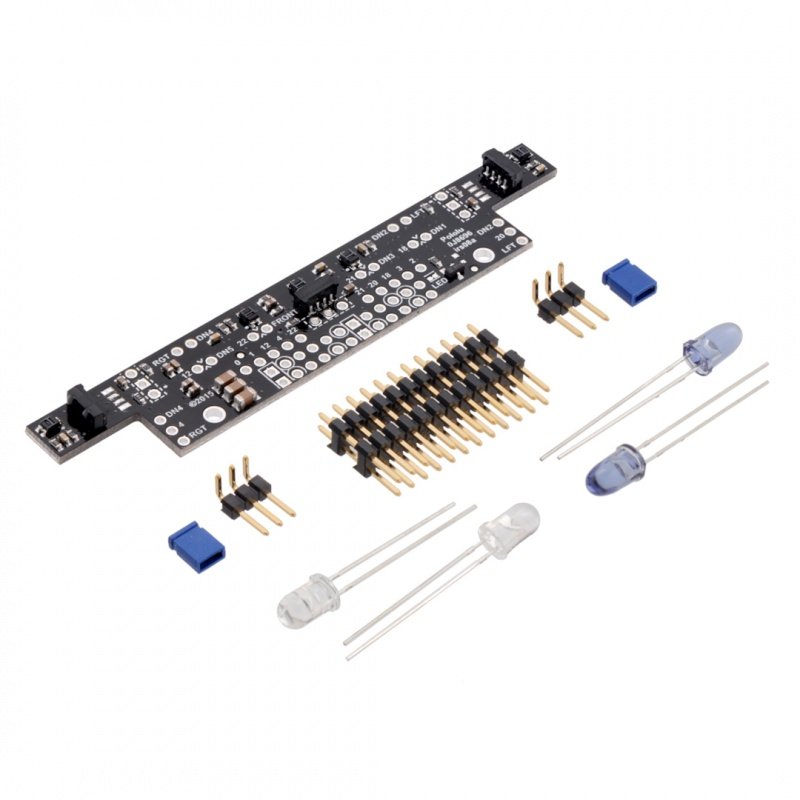





Das Board ist mit einer Sensormatrix für den Roboter Pololu Zumo 32u4 ausgestattet . Auf der Platine befinden sich 5 reflektierende Sensoren GP2S60 von Sharp , gekennzeichnet als DOWN1, DOWN2, DOWN3, DOWN4, DOWN5 und 3 Ultraschall-Abstandssensoren TSSP77038 von Vishay , gekennzeichnet auf der Platine als LEFT, RIFGT, DOWN. Reflexionssensoren können verwendet werden, um die Linie zu erkennen, auf der sich der Roboter bewegen soll, oder um den Rand des Rings zu erkennen, während Abstandssensoren es dem Roboter ermöglichen, ein sich näherndes Hindernis zu erkennen.

Elemente, die im Roboter enthalten sind .
Die Kampfroboterplattform Pololu Zumo 32u4 der Minisumo- Klasse erfüllt alle Anforderungen von Roboterkämpfen, d.h. sie hat Abmessungen von 10 x 10 cm und ein Gewicht von 500 g . Der Roboter ist mit zwei Gleichstrommotoren, einem Kampfpflug und einem Motherboard mit einem von Pololu A-Star bekannten ATmega32u4 -Mikrocontroller ausgestattet. Es wird von vier AA-Batterien mit Strom versorgt und über microUSB-Anschlüsse mit der Arduino IDE-Umgebung programmiert.
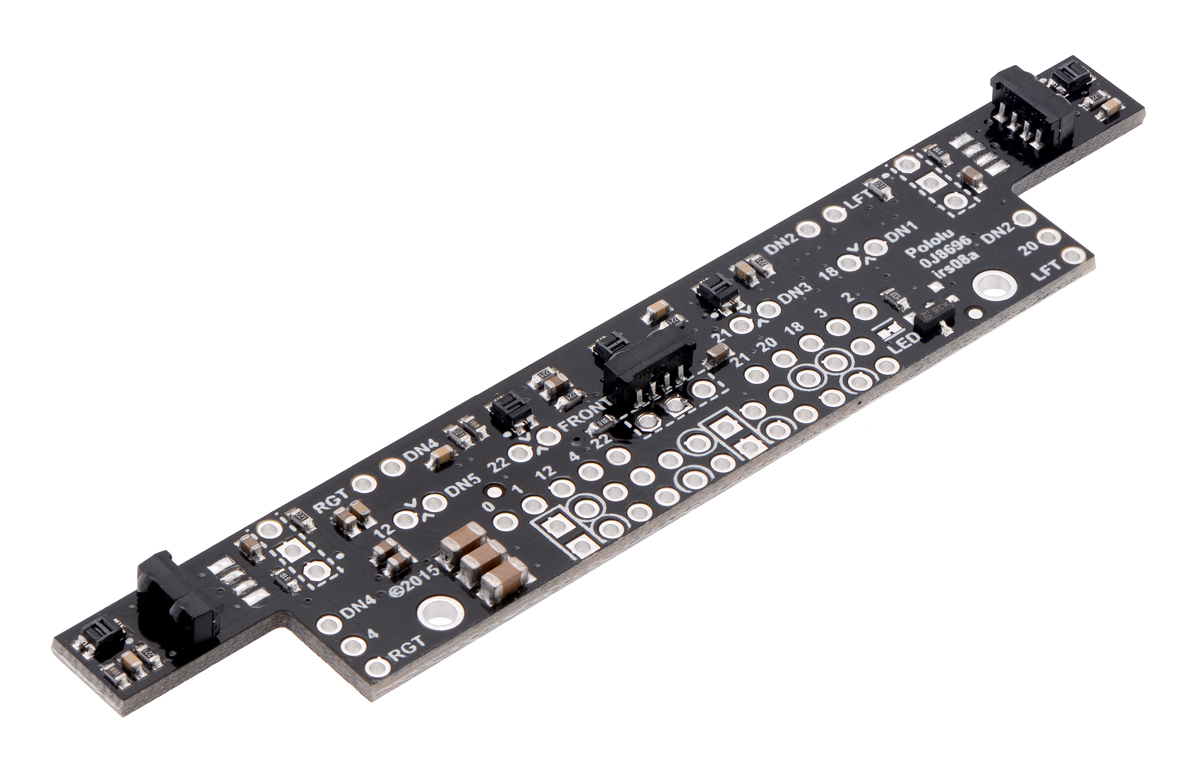 Sensormatrix für Zumo 32u4.
Sensormatrix für Zumo 32u4.  Roboter Zumo 32u4 mit montierter Sensorleiste.
Roboter Zumo 32u4 mit montierter Sensorleiste.Die Werte der Sensoren werden durch Messen der Entladezeit des Kondensators gelesen. Diese Lösung eliminiert die Notwendigkeit, einen Analog-Digital-Wandler zu verwenden.
Ein typischer Ablauf zum Auslesen von Sensorwerten:
1. Einschalten der IR-LEDs (falls sie zuvor ausgeschaltet waren)
2. Setzen der I/O-Pins des Mikrocontrollers als Ausgang und Erzeugen eines High-Zustands.
3. Warten Sie einige Mikrosekunden, bis sich der 1-nF-Kondensator aufgeladen hat
4. Einstellen der Pins I / O als Eingang (hochohmiger Zustand)
5. Messen Sie die Entladezeit des Kondensators, indem Sie darauf warten, dass die E/A-Leitungen niedrig werden.
6. Ausschalten der IR-LEDs (optional).
Die obigen Schritte sollten parallel für alle Sensoren durchgeführt werden.
Die Arduino-Bibliothek für Zumo enthält Funktionen, mit denen Sie ganz einfach Werte von Sensoren auslesen und Infrarot-Sender steuern können. Dadurch muss der Anwender die obigen Abläufe nicht selbst im Programm implementieren.
Während die Intensität des reflektierten Lichts hoch ist (Lichtfarbe), beträgt die Entladezeit des Kondensators einige Mikrosekunden, ohne Reflexion erhöht sie sich auf mehrere Millisekunden. Sinnvolle Werte lassen sich in 1-ms-Schritten messen – wenn nur Schwarz und Weiß ohne Zwischenfarben unterschieden werden, was für Minisumos und Linienfolger ausreicht. Dadurch können alle Sensoren mit 1 kHz abgetastet werden. Wenn Sie mit der niedrigeren Frequenz zufrieden sind, können Sie den Stromverbrauch reduzieren, indem Sie die Infrarotstrahler ausschalten. Beispielsweise können bei 100 Hz die Leuchtdioden zu 90 % der Zeit abgeschaltet werden, wodurch die durchschnittliche Stromaufnahme von 40 mA auf 4 mA reduziert wird.
Nützliche Links |
| PAKETBREITE | 12 cm |
| PAKETHÖHE | 15 cm |
| PAKETTIEFE | 0.5 cm |
| PAKETGEWICHT | 0.012 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!
Herkunftsland: der Vereinigten Staaten
Hersteller-Kontaktdaten: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin








