











































































































































































































Schrittmotortreiber mit dem Toshiba TB67S128FTG-Chip , mit dem Sie die Strombegrenzung und die Auflösung von Schritten bis zu 1/128 einstellen können. Bei einer Spannung von 6,5 V bis 44 V beträgt die maximale Stromaufnahme pro Spule 5 A. Das angewandte System ermöglicht einen Stromfluss von bis zu 2,1 A ohne Verwendung eines Kühlkörpers.
Schrittmotortreiber mit dem Toshiba TB67S128FTG Chip , mit dem Sie die Strombegrenzung und die Auflösung von Schritten bis zu 1/128 einstellen können. Das System kann einen Schrittmotor mit einem Gerät steuern, mit dem Sie logische Zustände erzeugen können, z. B. Arduino , Raspberry Pi . Bei einer Spannung von 6,5 V bis 44 V beträgt die maximale Stromaufnahme pro Spule 5 A. Das verwendete System ermöglicht den Fluss von bis zu 2,1 A Strom ohne Verwendung eines Kühlkörpers.
Im Set enthalten: Modul, Verschraubungen und Goldpinleisten zur Selbstmontage. |
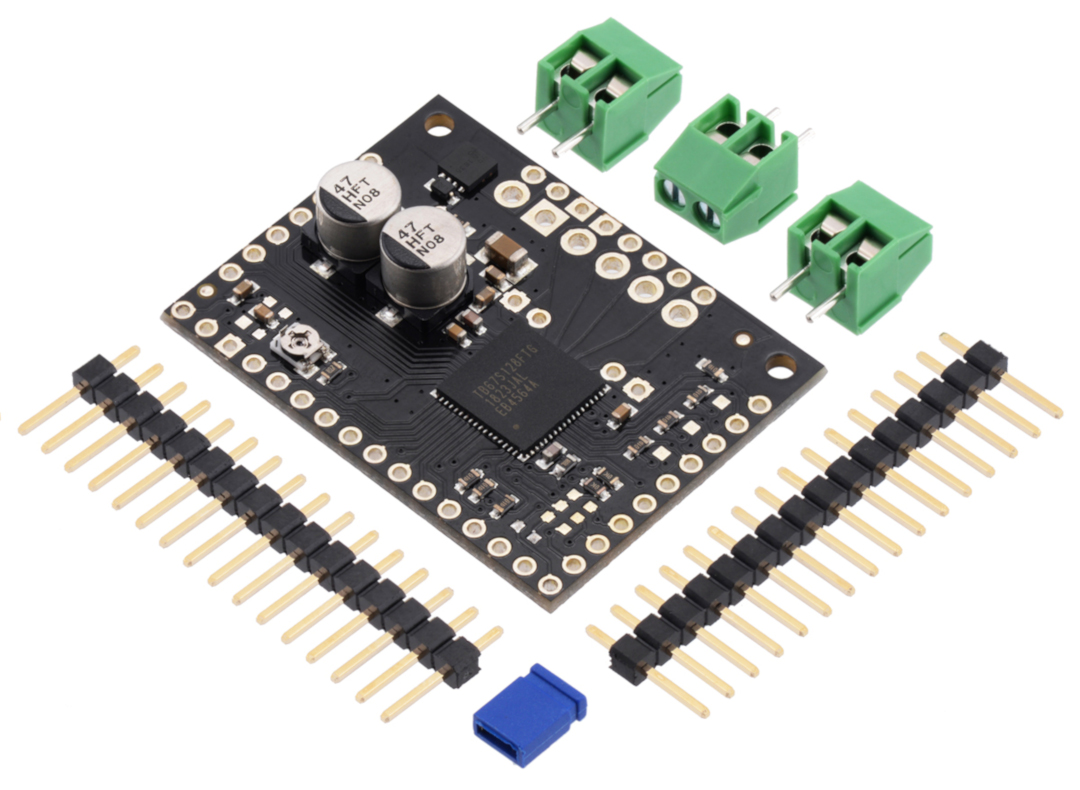
Der Treiber für Motoren TB67S128FTG, das Kit enthält Stecker zur Selbstmontage.
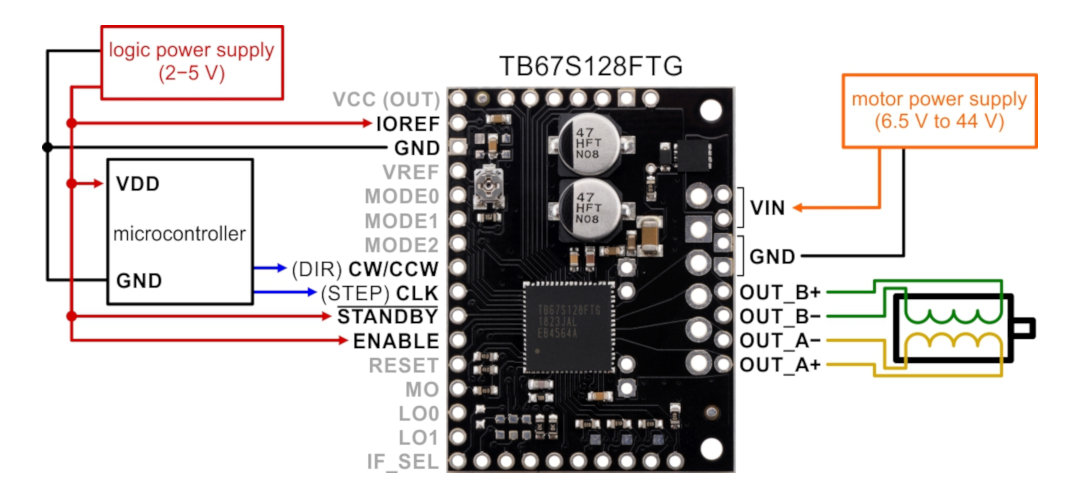
Das minimale Diagramm zum Verbinden des Controllers mit einem Mikrocontroller und einem Schrittmotor.
Um einen Schrittmotor zu steuern, schließen Sie das System wie im Bild rechts gezeigt an.
Der Controller benötigt eine Stromversorgung von 6,5 V bis 44 V , die an die Anschlüsse VIN und GND angeschlossen ist. Das gewählte Netzteil sollte in der Lage sein, den richtigen Strom für den Schrittmotor zu liefern. 5-V -Ausgang vom internen Regler des TB67S128FTG-Chips am VIN-Pin. Der Ausgang hat eine Kapazität von 5 mA , er kann optional zur Versorgung eines benachbarten IOREF-Pins verwendet werden. Bei entsprechendem Anschluss können auch Vier-, Sechs- und Achtleitermotoren mit der Steuerung betrieben werden. Weitere Informationen in den FAQ .
Das Layout ermöglicht Ihnen die Auswahl aus sieben Schrittauflösungen. Die Auflösung wird eingestellt, indem für jeden der MODE 1/2/3-Eingänge der hohe oder niedrige Status festgelegt wird.Nachstehend finden Sie eine Tabelle, die die möglichen Schrittauflösungseinstellungen zeigt.
Die Anzahl der an den CLK (STEP)-Pin gegebenen Impulse entspricht der Anzahl der vom Motor ausgeführten Schritte, die Drehrichtung der Motorwelle wird mit dem CW / CCW (DIR)-Pin ausgewählt. Beide Eingänge haben einen Pull-up-Widerstand, der 100 kΩ absenkt. Wenn der CW / CCW-Pin getrennt bleibt, dreht sich der Motor in eine Richtung.
Das System verfügt über zwei Eingänge zur Steuerung der Leistungszustände: STANDBY und ENABLE, beide müssen hoch sein, damit der Motor ordnungsgemäß funktioniert. Weitere Informationen in der Dokumentation .
Warnung! Das Anschließen und Trennen des Motors bei eingeschalteter Steuerung kann das System beschädigen. |
| MODUS1 | MODUS2 | MODUS3 | Schrittauflösung |
|---|---|---|---|
| Niedrig | Niedrig | Niedrig | Voller Schritt |
| Niedrig | Niedrig | Groß | Ein halber Schritt |
| Niedrig | Groß | Niedrig | 1/4 Schritt |
| Niedrig | Groß | Groß | 1/8 Schritt |
| Groß | Niedrig | Niedrig | 1/16 Schritt |
| Groß | Niedrig | Groß | 1/32 Schritt |
| Groß | Groß | Niedrig | 1/64 Schritt |
| Groß | Groß | Groß | 1/128 Schritt |
Einstellen der Strombegrenzung für Pololu-Motortreiber.
| Stromspannung aus | 6,5 V |
| Stromspannung Nieder | 44,0 V |
| Aktuelle Effizienz | 2,1 A |
| Anzahl der Kanäle | 1 |
| PAKETBREITE | 8.5 cm |
| PAKETHÖHE | 10.5 cm |
| PAKETTIEFE | 0.5 cm |
| PAKETGEWICHT | 0.012 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!
Herkunftsland: der Vereinigten Staaten
Hersteller-Kontaktdaten: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin








