
























































































































































































































































































CAN-Bus ( Controller Area Network – Can Bus ) ist ein Gerät, das eine bidirektionale Kommunikation zwischen Mikroprozessoren ermöglicht. Mit anderen Worten, es handelt sich um einen seriellen Kommunikationsbus , der hauptsächlich zur Unterstützung von Systemen wie ABS oder Motorsteuerung entwickelt wurde. Die hohe Zuverlässigkeit und Popularität des CAN-Busses trug zu seiner Entwicklung und breiteren Verwendung bei. Derzeit wird es in modernen Autos, im Bauwesen und in der Industrieautomation eingesetzt. Der CAN-Bus ist eine in komplexeren Projekten weit verbreitete Lösung.

- Neu
- Kostenloser Versand

Elegoo Filamentpaket mit Spulen - Spar-Starterpaket PLA - 4 Stück.
Index: PKT-29216
- Neu
- Paket
- Kostenloser Versand

Creality CR-PETG Filament Nachfüllpackung 1,75 mm 1 kg – Beige
Index: CRL-28380
- Neu
- Kostenloser Versand

- Neu
- Kostenloser Versand

- Ausverkauf
- Kostenloser Versand
- Sonderangebot

Luxonis Oak-1 - KI-Bilderkennungskit - Auto-Focus
Index: LUX-20384
- Ausverkauf
- Kostenloser Versand
- Sonderangebot

- Ausverkauf
- Kostenloser Versand
- Sonderangebot
- Reduziert
- Kostenloser Versand
- Sonderangebot

Kamera RpiCam OV5647 5MPx - Fischauge Nacht 160 ° - für Raspberry Pi
Index: ODS-12759
- Reduziert
- Kostenloser Versand
- Sonderangebot

PowerHD HD-1900MG micro - analoger Servo
Index: PHD-24003
- Reduziert
- Kostenloser Versand
- Sonderangebot

- Reduziert
- Kostenloser Versand
- Sonderangebot

Aeotec Z-Stick 10 Pro - USB-Modul - Z-Wave/ZigBee
Index: ZWV-27017
- Ausverkauf
- Kostenloser Versand
- Sonderangebot

- Ausverkauf
- Kostenloser Versand
- Sonderangebot

Filament Devil Design PLA 1,75 mm 2 kg - Weiß
Index: DEV-15238
- Reduziert
- Kostenloser Versand
- Sonderangebot

JT-JDS2960 60MHz Funktionsgenerator - 2 Kanäle
Index: SEG-26210
- Ausverkauf
- Kostenloser Versand
- Sonderangebot

CAN-Bus (Controller Area Network)
Produkte: 15
Wird geladen...
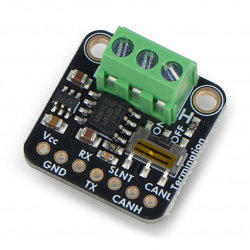
Modul mit CAN-Schnittstelle - SN65HVD230 - Waveshare 3945
Das Modul, das auf dem SN65HVD230 basiert, ermöglicht die Verbindung eines Mikrokontrollers mit dem CAN-Bus. Der Chip ist pin-kompatibel mit dem PCA82C250. Das Modul wird mit...
Index: WSR-06960
Index: WSR-06960
- Kostenloser Versand

Seeed Xiao RA4M1 - ARM Cortex M4 - Seeedstudio 102010551
Das Xiao RA4M1 ist ein kompaktes Entwicklungsboard mit dem Renesas RA4M1 32-bit Mikrocontroller (ARM Cortex M4, 48 MHz). Es bietet 256 kB Flash-Speicher, 32 kB SRAM, 8 kB...
Index: SEE-25608
Index: SEE-25608
- Kostenloser Versand

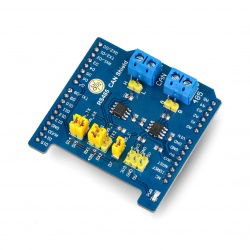
CAN-Bus Shield v2.0 DFRobot - Schild für Arduino
Shield für Arduino, das die Verwendung des seriellen CAN-Busses ermöglicht. Ausgestattet mit MCP2515-Chips. Es hat einen microSD-Kartenanschluss. Es arbeitet mit einer Spannung...
Index: DFR-06114
Index: DFR-06114
- Kostenloser Versand

CAN-FD-Erweiterungs-HAT – 2-Kanal-isolierter Overlay-CAN-FD – für Raspberry Pi – Waveshare 17075
CAN FD Expansion HAT ist ein von Waveshare hergestelltes Overlay , das den CAN - Bus erweitert . Unterstützt das ursprüngliche CAN 2.0-Protokoll und die CAN FD -Erweiterung...
Index: WSR-20081
Index: WSR-20081
- Kostenloser Versand

Grove - CAN-Bus-Modul - I2C - Seeedstudio 113020111
Das I2C-CAN-BUS-Modul MCP2551 und MCP2515 ermöglicht die Verwendung von Arduino für die Kommunikation mit dem CAN-BUS-Bus, beispielsweise für die Fahrzeugdiagnose (das System...
Index: SEE-20123
Index: SEE-20123
- Kostenloser Versand

CAN Bus Modul für Xiao und QT Py - MCP2515 - SN65HVD230 - Seeedstudio 105100001
Erweiterungsboard für Seeed Xiao-Mikrocontroller , das die Kommunikation über das CAN-Bus-Protokoll ermöglicht. Es verwendet den MCP2515-Controller und den...
Index: SEE-25378
Index: SEE-25378
- Kostenloser Versand

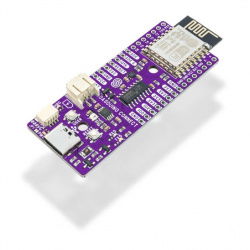
Der Adafruit RP2040 CAN Bus Feather ist ein fortschrittliches Entwicklungsboard mit einem RP2040 Mikrocontroller und einem MCP2515 Chip , der die Kommunikation über den...
Index: ADA-23378
Index: ADA-23378
- Kostenloser Versand

Grove - CAN-Bus-Modul - GD32E103 - Seeedstudio 114992978
Das Modul basiert auf dem GD32E103 -System, mit dem Sie den Mikrocontroller mit dem CAN-Bus verbinden können. Es ermöglicht Ihnen, Arduino zur Kommunikation mit dem...
Index: SEE-21906
Index: SEE-21906
- Kostenloser Versand

CAN Bus BFF Add-On - CAN Bus Modul - MCP25625 - SPI - für QT Py und Xiao - Adafruit 5877
Das Adafruit CAN Bus BFF Add-On ist ein praktisches Overlay, mit dem die QT Py- und Xiao-Boards um CAN-Bus-Kommunikationsfunktionen ergänzt werden können. Das Modul...
Index: ADA-25280
Index: ADA-25280
- Kostenloser Versand

Schwerkraft - CAN-TTL Kommunikationsmodul - mit SLCAN Protokoll - DFRobot TEL0150
Der CAN-zu-UART- und USB-Konverter von DFRobot unterstützt Spannungen von 3,3 V bis 5 V . Durch das Senden einfacher AT-Befehle können Sie CAN-Datenübertragungen...
Index: DFR-23473
Index: DFR-23473
- Kostenloser Versand
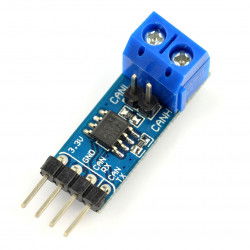
RS485 / CAN-Schild - Schild für Arduino - Waveshare 10771
Abschirmung, mit der Sie den Arduino an die RS485-Schnittstelle oder den CAN-Bus anschließen können. Ausgestattet mit Treibern: MAX3485 und SN65HVD230 für CAN, funktioniert es...
Index: WSR-04517
Index: WSR-04517
- Kostenloser Versand

CAN-Bus-Overlay für Raspberry Pi Pico - Waveshare 23775
Ein Modul von Waveshare, das eine CAN-Bus-Kommunikation mit großer Reichweite ermöglicht und für den Raspberry Pi Pico entwickelt wurde. Es enthält den MCP2515...
Index: WSR-22827
Index: WSR-22827
- Kostenloser Versand
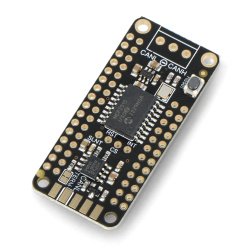
CAN Bus Modul - MCP2515 - SPI - Overlay für Feather - Adafruit 5709
Ein von Adafruit hergestelltes Modul, das die Kommunikation über den CAN-Bus ermöglicht. Es ist kompatibel mit der Feather-Familie von Boards. Der integrierte Chip MCP2515...
Index: ADA-22888
Index: ADA-22888
- Kostenloser Versand

Das isolierte Zweikanal-CAN-HAT-Modul für Raspberry Pi ermöglicht dank der MCP2515- und SI65HVD230-Chips eine stabile CAN-2.0-Kommunikation . Verfügt über einen digitalen...
Index: WSR-25291
Index: WSR-25291
- Kostenloser Versand
CAN-Bus-Modul - TJA1051T/3 - Adafruit 5708
Dieses Modul basiert auf dem TJA1051T/3 -Chip und ermöglicht den Anschluss eines Mikrocontrollers an jedes Erweiterungsmodul, das über den CAN- Bus kommuniziert. Das Modul...
Index: ADA-22791
Index: ADA-22791
- Kostenloser Versand
Auch prüfen
CAN-Bus (CAN-Bus) – Die wichtigsten Informationen
Die CAN-Kommunikation ( CAN-System) hat sich zu einem der beliebtesten Standards industrieller Kommunikationsnetzwerke entwickelt – in Polen steht sie an zweiter Stelle nach dem geschätzten Profibus-Standard. Über den CAN-Bus übertragen Steuergeräte Signale an Roboter (oder Automaten).
Die Funktionsgrundlage des CAN-Netzwerks (Controller Area Network)
Es eignet sich auch perfekt für die Kommunikation (Datenübertragung) zwischen Sensoren, Controllern und Rekordern . Es zeichnet sich durch Stabilität und hohe Datenübertragungsgeschwindigkeit aus. Bedenken Sie jedoch, dass die Geschwindigkeit mit der Länge des Kabels deutlich abnimmt. Mit anderen Worten: Mit zunehmender Entfernung nimmt die Geschwindigkeit ab.
CAN-Netzwerke sind nützlich bei der Automatisierung von Produktionslinien, verschiedenen Maschinensystemen, zur Steuerung von Öfen, Kühlhäusern und Druckern. Es ist wichtig zu wissen, dass die CAN-Bus-Topologie die Grundlage für den Betrieb des CAN-Netzwerks ist.
CAN-Bus – Module, Konverter und Overlays – Was bieten wir?
Unser Angebot umfasst hauptsächlich Module, mit denen Sie Ihren Mikrocontroller einfach an den CAN-Bus anschließen können . Overlays für gängige Platinen (Mikrocontroller) eignen sich oft perfekt für viele Anwendungen – wir haben eine große Auswahl an Overlays für Arduino.
Oftmals erfolgt die Kommunikation mit dem Gerät über die SPI-Schnittstelle, und auf dem Shield sind die Mikrocontroller-Pins oben platziert. Der CAN-Kommunikationsbus wird nach wie vor am häufigsten in der Automobilindustrie verwendet. Dort ist unter anderem ein Arduino-Shield erhältlich, das an den Standard-OBD-II-Autostecker angepasst ist und Anweisungen für ein Beispiel für den Anschluss des Geräts enthält. Das Gerät kann unter anderem verwendet werden zur Fehlerkontrolle und prüft beispielsweise, ob die Airbags aktiviert sind.
Es ist zu beachten, dass bei Verwendung des CAN-Busses und von Karten mit ATmega-Mikroprozessoren aufgrund ihrer geringeren Effizienz die Funktionalität des Busses eingeschränkt wird. Wir bieten auch Module mit CAN-Schnittstellen an – die Kommunikation erfolgt bei ihnen in der Regel über einen USB-Anschluss und eine serielle Schnittstelle UART-RX, TX. Auf Windows- oder Linux-Systemen wird er als virtueller COM-Port angezeigt. Bei Fragen oder Unklarheiten zum CAN-Bus kontaktieren Sie uns bitte per E-Mail, Telefon oder über das auf der Website verfügbare Formular.
CAN-Bus - FAQ
CAN ist ein serieller Multi-Master-Busstandard zur Verbindung elektronischer Steuergeräte (ECUs), auch Knoten genannt. Für die CAN-Kommunikation sind zwei oder mehr Knoten erforderlich. Sie wurden unter anderem in Motorrädern und Autos eingesetzt. Weitere Informationen finden Sie im Botland-Blog .
CAN-BUS ist der ursprüngliche serielle Bus für die Kommunikation zwischen Modulen. Es wurde 1983 von Robert Bosch erfunden. Dann wurde die Idee unter anderem umgesetzt von Intel und Philips, und im Laufe der Zeit tauchte CAN-BUS ab 1991 in Mercedes-Fahrzeugen auf.
CAN H und CAN L kommen zusammen. Dies sind die Differenzsignale des Transceivers. Der Zweck des CANH- und CAN-L-„Tests“ besteht darin, die physische Integrität des CAN-Busses (Controller Area Network) zu bestimmen, indem die niedrigen (CAN-L) und hohen (CAN-H) Leitungsspannungen überprüft werden. Wenn das dominante Bit übertragen wird, steigt die CAN-High-Spannung und die CAN-Low-Spannung sinkt.