


























































































































































































































































































Sensor zur Messung von Beschleunigung und Winkelgeschwindigkeit in drei Achsen. Es ist eine Kombination aus einem 3-Achsen-Beschleunigungsmesser und einem Gyroskop. Es zeichnet sich durch einfache Bedienung aus, kommuniziert über den I2C-Bus , arbeitet mit Spannungen von 3 V bis 5 V.
Sensor zur Messung von Beschleunigung und Winkelgeschwindigkeit in drei Achsen. Es ist eine Kombination aus einem 3-Achsen-Beschleunigungsmesser und einem Gyroskop. Es zeichnet sich durch einfache Bedienung aus, kommuniziert über den I2C-Bus , arbeitet mit Spannungen von 3 V bis 5 V.

DFRobot SEN0142-Modul .
Das Modul ermöglicht Ihnen über einen 3-Achsen-Beschleunigungsmesser und ein Gyroskop die Messung von Beschleunigung und Winkelgeschwindigkeit im dreidimensionalen Raum. Das MPU-System verfügt über eine Hardware-DMP-Einheit (Digital Motion Processor), mit der Sie Daten in die Position in Bezug auf die Erde umwandeln können.
Zur Kommunikation mit der Zentraleinheit wird der beliebte I2C (TWI) Bus verwendet. Das Modul verfügt über passive Elemente, die für den ordnungsgemäßen Betrieb des Systems erforderlich sind. Den Abschluss bilden die beliebten Goldpin-Anschlüsse, die es ermöglichen, den Sensor per Kabel anzuschließen oder direkt auf dem Steckbrett zu befestigen.
|
Das Produkt ist mit Arduino kompatibel Der Hersteller stellt eine Bibliothek für Arduino und eine ausführliche Bedienungsanleitung zur Verfügung. |
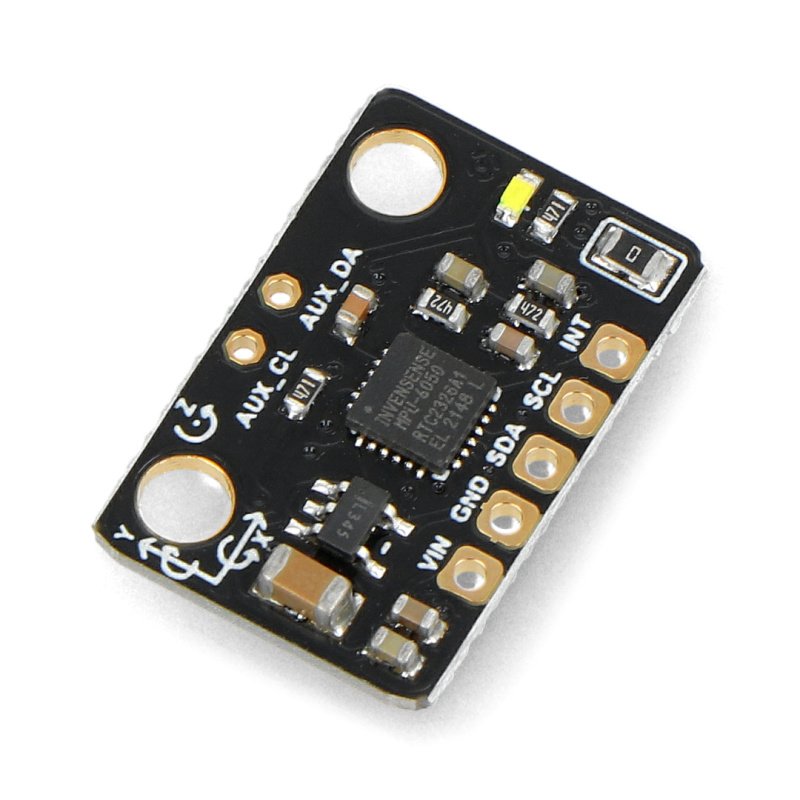
Der Sensor hat vier Hauptausgänge zur Montagevon Goldpin -Steckern - 2,54 mm Raster (der Streifen ist im Kit zur Selbstmontage enthalten).

MPU-6050 - Pin-Diagramm .
| Name | Beschreibung |
|---|---|
| Fahrgestellnummer | Versorgungsspannung von 3,0 V bis 5,0 V. |
| Masse | Die Masse des Systems. |
| INT | Externer Interrupt-Ausgang - Open Drain (Details in Dokumentation) |
| SCL | Die Taktleitung des I2C-Busses (TWI). |
| SDA | Die Datenleitung des I2C-Bus (TWI). |
| AUX_CL | Taktleitung des I2C (TWI) Busses zum Anschluss eines externen Magnetometers. |
| AUX_DA | Datenleitung des I2C-Bus (TWI) zum Anschluss eines externen Magnetometers. |
Ein beispielhaftes Programm zur Erfassung von Messdaten eines Sensors.
Nützliche Links |
| Niebezpieczne | Komponente |
| PAKETBREITE | 5.5 cm |
| PAKETHÖHE | 2.5 cm |
| PAKETTIEFE | 6 cm |
| PAKETGEWICHT | 0.006 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!

Produktinformation
Das Produkt ist eine Komponente, die für die weitere Montage/den Prototypenbau bestimmt ist. Es stellt kein eigenständiges fertiges Produkt im Sinne der Vorschriften über die Produktsicherheit dar.
Dane GPSR
Herkunftsland: China
Hersteller-Kontaktdaten: Zhiwei Robotics Corp. Unit 01, 26/F, A1 Shanghai T & I Tower, No. 1699 Zhongke Road, Pudong District, Shanghai, P.R.China [email protected]
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]









