






































































































































































































































































Mikroservo mit einem Gewicht von 13,4 g, der sich durch stabilen Betrieb, präzisen Arbeitswinkel und einfache Installation auszeichnet. Es hat ein Metallgetriebe. Die Betriebsspannung beträgt 4,8V bis 6V . Bei Versorgung mit 6 V beträgt das Drehmoment des Servos 2,2 kg * cm. Gleichzeitig kann das Servo bei minimaler Leistung reibungslos laufen und mit einer normalen Batterie oder USB betrieben werden. Darüber hinaus können Benutzer den Servo mithilfe der Servoantriebsbibliotheken in der Arduino IDE direkt steuern. Die Länge des Netzkabels beträgt 30 cm und die Abmessungen des Produkts betragen 22,8 x 12,2 x 28,5 mm.

Servo MG-90S - Mikro.
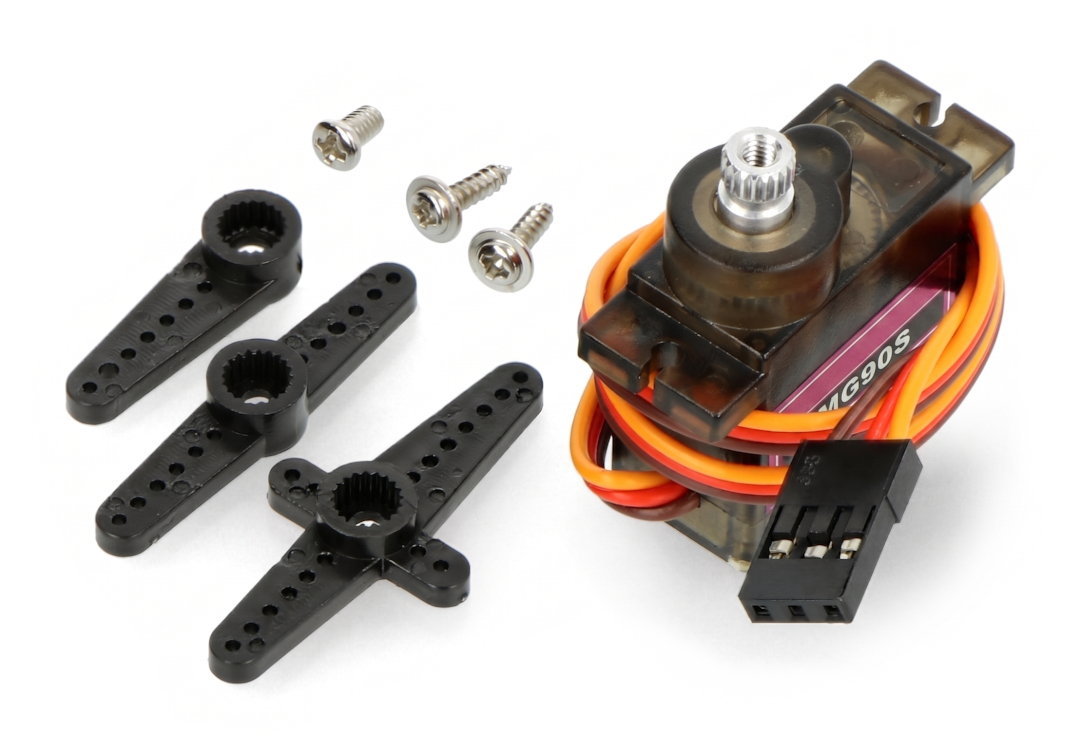
Im Bausatz enthaltene Artikel.
Das Mikroservo mit der Bezeichnung MG-90S bietet einen Bewegungswinkel von 180 o und eine Geschwindigkeit von 0,08 s / 60 ° (bei einer Versorgungsspannung von 6 V) - dies bedeutet, dass die Drehung der Deichsel von einer Extremposition aus möglich ist ein anderer kann in nur 1/4 Sekunde hergestellt werden.
Das eingebaute Untersetzungsgetriebe liefert ein Drehmoment von 2,2 kg * cm @ 6 V / 1,8 kg * cm @ 4,8 V. Metallgetriebe-Modi ermöglichen einen Langzeitbetrieb ohne die Gefahr, das Servo durch Abrieb oder Zahnbruch zu beschädigen, d.h ein Problem für kleine, billige Modellbauservos mit Kunststoffgetriebe.
Wie andere Mikroservos kann auch das MG-90S mit den beiden mitgelieferten Breitkopfschrauben an einer Roboterstützstruktur, einem RC-Fahrzeug oder einem anderen Mechanismus befestigt werden.
Die Übertragung des Antriebs erfolgt über Kabel (Links), die an den entsprechenden Löchern in den T-Bars (auch mit dem Servo erhältlich) befestigt sind. Es stehen drei Hebel zur Auswahl - einseitig, zweiseitig gerade und vierarmig (mit zwei kürzeren Armen - je 2 Löcher - und zwei längeren mit je 6 Löchern).
| Stromspannung aus | 4,8 V. |
| Stromspannung Nieder | 6,0 V |
| Drehmoment | 2,2 kg * cm |
| Servo - Bereich | 180 ° |
| Servo - Größe | Mikro |
| Niebezpieczne | Komponente |
| PAKETBREITE | 7 cm |
| PAKETHÖHE | 10 cm |
| PAKETTIEFE | 1 cm |
| PAKETGEWICHT | 0.014 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!

Herkunftsland: China
Hersteller-Kontaktdaten: SHEN ZHEN YOU MAI KE TECHNOLOGY COLTD 2 Floor,C Building,Mingxin Industrial Park,No.28,Hualong Road Longhua District, Shenzhen, 518109 China Phone: 8617724681799
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin
Produktinformation
Das Produkt ist eine Komponente, die für die weitere Montage/den Prototypenbau bestimmt ist. Es stellt kein eigenständiges fertiges Produkt im Sinne der Vorschriften über die Produktsicherheit dar.

