


























































































































































































































































































DasGeneral Driver Board ist ein multifunktionaler Treiber, der auf dem ESP32-WROOM-32 Modul basiert. Es bietet eine breite Palette an Möglichkeiten und erlaubt Ihnen, Ihr Projekt mit zusätzlichen Peripheriegeräten zu erweitern. Es ist in erster Linie für den Bau von Robotern konzipiert und funktioniert mit Plattformen wie Raspberry Pi und Jetson Nano. Es ermöglicht die Steuerung von DC-Motoren mit und ohne Encoder, Servos. Außerdem verfügt er über einen Ausgang zum Anschluss eines OLED-Displays, einer WiFi-Antenne oder eines Lidar-Sensors. Darüber hinaus hat der Hersteller das Modul auch mit IMU-Sensoren ausgestattet - einem 3-Achsen-Beschleunigungsmesser, einem 3-Achsen-Magnetometer mit Temperaturmessung und einem 3-Achsen-Gyroskop.
Das Modul ist mit Raspberry Pi und Jetson Nano kompatibel.
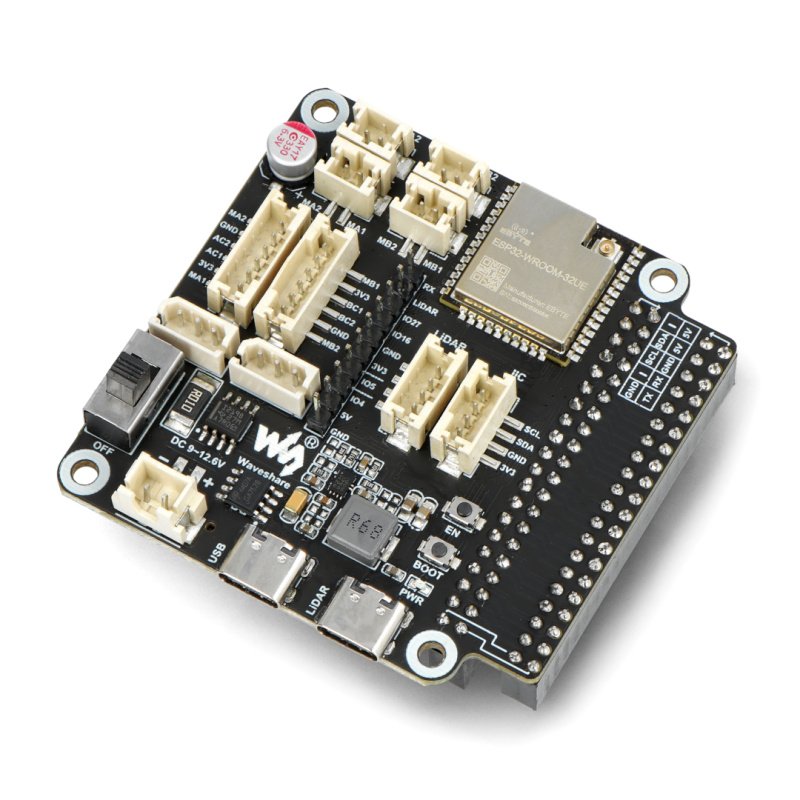
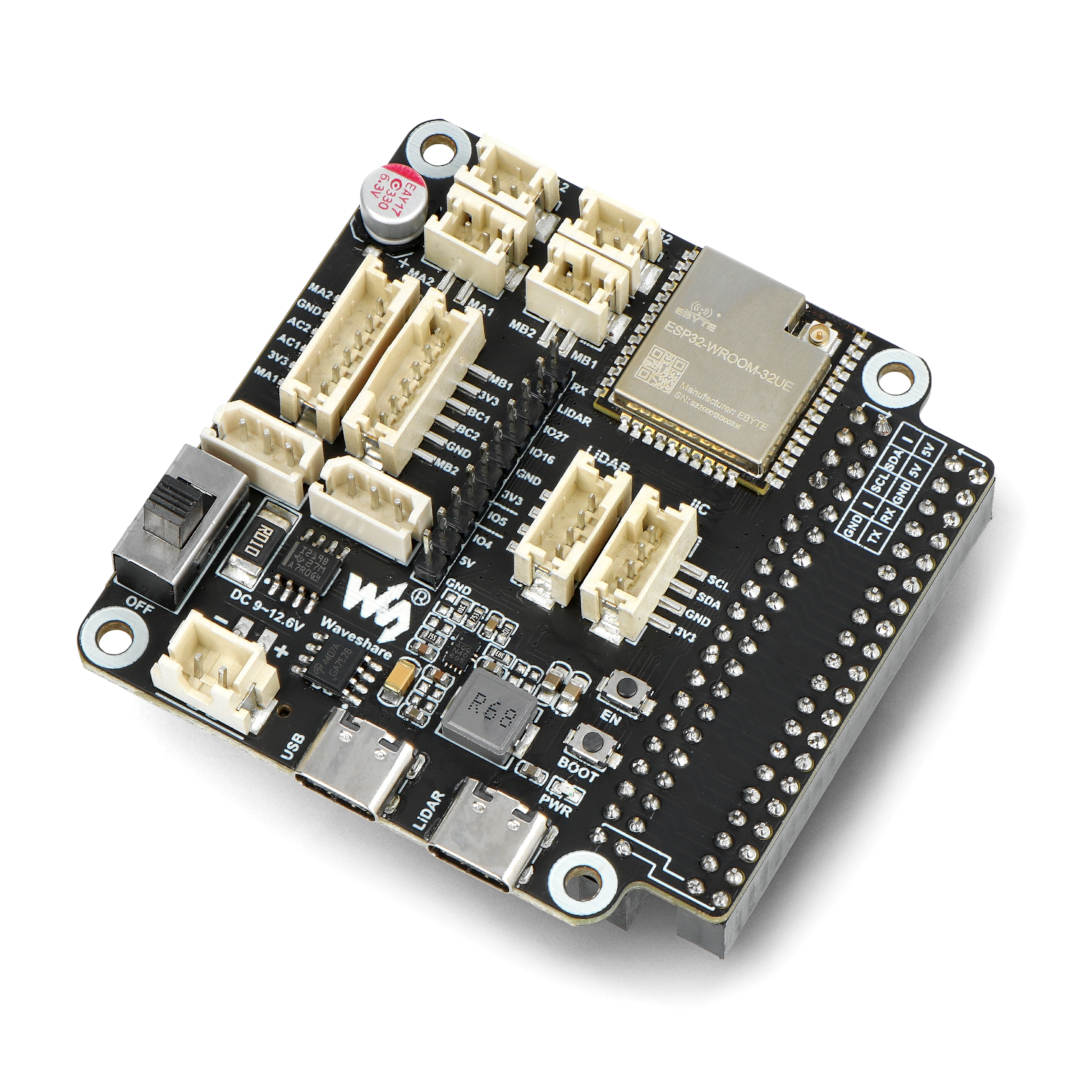 General Driver board - multifunktionaler Treiber für Roboter - ESP32 - WiFi, Bluetooth, ESP-NOW - Waveshare 23730.
General Driver board - multifunktionaler Treiber für Roboter - ESP32 - WiFi, Bluetooth, ESP-NOW - Waveshare 23730.
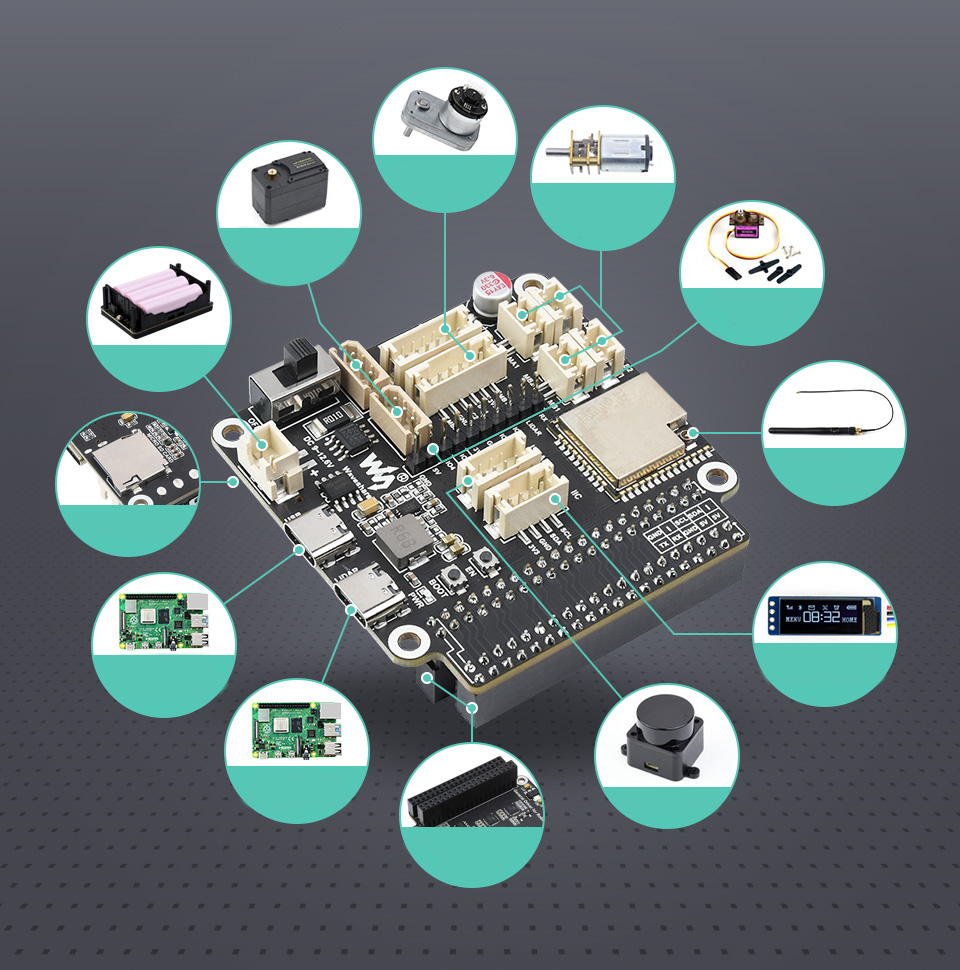
Breite Palette von Möglichkeiten.
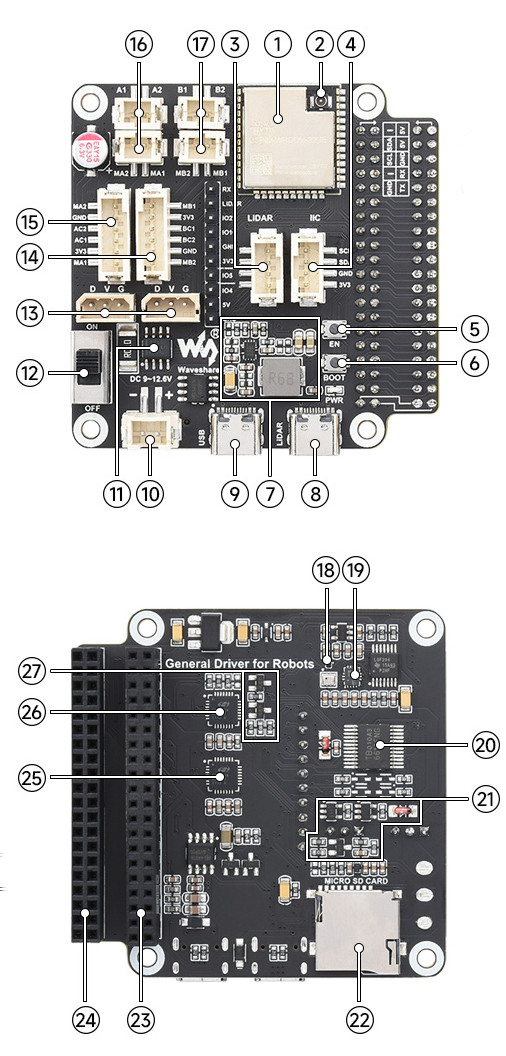
Anordnung der Komponenten auf der Platine.
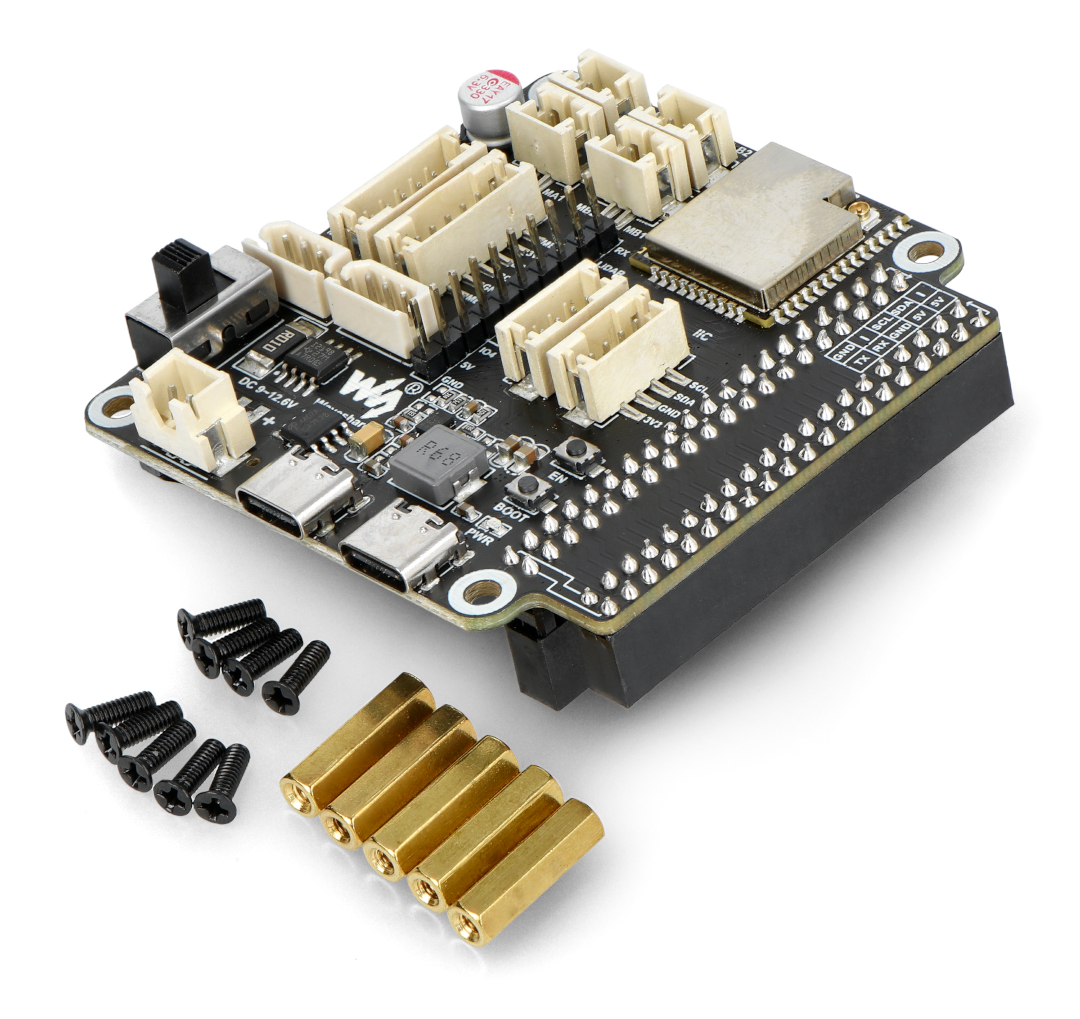
Im Bausatz enthaltene Komponenten.
| Niebezpieczne | Komponente |
| PAKETBREITE | 7 cm |
| PAKETHÖHE | 8 cm |
| PAKETTIEFE | 2.7 cm |
| PAKETGEWICHT | 0.06 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!

Produktinformation
Das Produkt ist eine Komponente, die für die weitere Montage/den Prototypenbau bestimmt ist. Es stellt kein eigenständiges fertiges Produkt im Sinne der Vorschriften über die Produktsicherheit dar.
Dane GPSR
Herkunftsland: China
Hersteller-Kontaktdaten: Seednew Limited 3/F, Building 6, Shanglilang Zhichuangyuan, Pingji Avenue, Nanwan Street, Longgang District, Shenzhen, 518115, China
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin




