













































































































































































































Schrittmotortreiber basierend auf dem TB67S279FTG -System. Es wird mit einer Spannung im Bereich von 10 - 47 V betrieben, mit einer maximalen Stromaufnahme von 2 A pro Spule. Maximale Auflösung: 1/32 Schritte. Durch den Einsatz des TB67S279FTG-Treibers kann das System mehr Wärme abgeben, was einen Stromfluss von 1,2 A ohne Kühlkörper ermöglicht.
Das System ermöglicht es Ihnen, einen Schrittmotor mit einem Gerät zu steuern , mit dem Sie logische Zustände erzeugen können, z. B. Arduino , STM32Discovery , Raspberry Pi oder einen beliebigen Mikrocontroller . Das Pololu-Modul ist sehr einfach zu bedienen . Die ansteigende Flanke jedes Impulses am Pin CLK (STEP) entspricht einem Schritt. Die Wahl der Richtung erfolgt, indem dem Ausgang CW / CCW (DIR) der entsprechende Zustand gegeben wird (z. B. Low-Zustand - Drehung im Uhrzeigersinn, High-Zustand - umgekehrt). Die Steuerung hat auch die Möglichkeit, die Auflösung des Motorbetriebs auszuwählen.
Um einen bipolaren Schrittmotor zu steuern, schließen Sie das System wie in der folgenden Abbildung gezeigt an.
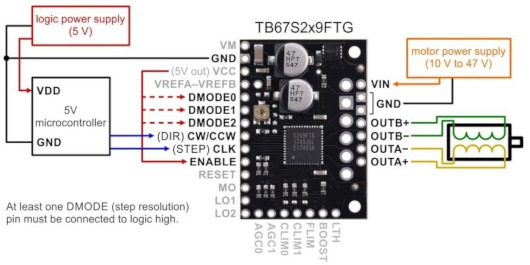
Minimaler Schaltplan zum Anschluss des Mikrocontrollers an TB67S2x9FTG.
Der Controller benötigt eine Versorgungsspannung von 10 V bis 47 V, die an die Pins VIN und GND angeschlossen wird.
Zur Versorgung des Logikteils des Moduls wird eine Spannung von 5 V benötigt, die an den Pin angeschlossen werden sollte VDD . Dem Pin wird die Motorversorgungsspannung im Bereich von 10 V bis 47 V zugeführt Fahrgestellnummer .
|
Warnung! Das Anschließen und Trennen des Motors bei eingeschalteter Steuerung kann das System beschädigen. |
Die Schrittweite wird durch die Eingänge DMODE0, DMODE1, DMODE2 gewählt. Mögliche Einstellungen sind in der folgenden Tabelle aufgeführt. Die Eingänge MS1, MS2 und MS3 haben einen internen Pull-Down-Widerstand ( 100kΩ ).
| MS1 | MS2 | MS3 | Auflösung |
| niedrig | niedrig | niedrig | Standby Modus |
| niedrig | niedrig | hoch | Voller Schritt |
| niedrig | hoch | niedrig | nicht kreisförmiger halber Schritt ("a") |
| niedrig | hoch | hoch | 1/4 Schritt |
| hoch | niedrig | niedrig | kreisförmiger halber Schritt ("b") |
| hoch | niedrig | hoch | 1/8 Schritt |
| hoch | hoch | niedrig | 1/16 Schritt |
| hoch | hoch | hoch | 1/32 Schritt |
Die ansteigende Flanke jedes Impulses am Pin CLK (STEP) entspricht einem Schritt. Die Wahl der Richtung erfolgt, indem dem Ausgang CW / CCW (DIR) der entsprechende Zustand gegeben wird (z. B. Low-Zustand - Drehung im Uhrzeigersinn, High-Zustand - umgekehrt). Wenn sich der Motor nur in eine Richtung drehen soll, kann der DIR-Stift ausgesteckt bleiben.
Wenn der RESET-Pin hoch geht, setzt der Controller seinen Zustand in der Umsetzertabelle zurück, die er auf den Anfangswert von 45° bringt. Dies entspricht 100 % der Stromgrenze an beiden Spulen im Vollschrittmodus und im nicht kreisförmigen Halbschrittmodus. Der RESET-Pin schaltet die Motorausgänge nicht ab, die Steuerung versorgt den Motor weiterhin mit Strom, gibt jedoch keine Informationen an den CLK-Ausgang
TB67S2x9FTG kann mehrere Fehlerzustände erkennen, die sie melden, wodurch einer oder beide LO-Kontakte auf Low gehen. Der Hersteller hat in die Dokumentation eine Tabelle mit Fehlerkombinationen an den Pins LO1 und LO2 aufgenommen.
Eine detaillierte Beschreibung der einzelnen Pins finden Sie auf der Website des Herstellers.
Nützliche Links |
| PAKETBREITE | 8.5 cm |
| PAKETHÖHE | 0.8 cm |
| PAKETTIEFE | 7 cm |
| PAKETGEWICHT | 0.01 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!
Herkunftsland: der Vereinigten Staaten
Hersteller-Kontaktdaten: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin












