





















































































































































































































































































Was ist ein Schrittmotor? Wie funktioniert ein Schrittmotor?
Aufbau eines Schrittmotors
Schrittmotor - Aufbau und Anwendung
Schrittmotoren sind Gleichstrommotoren, die sich durch bestimmte Hübe bewegen. Sie haben zahlreiche Spulen, die in Gruppen gruppiert sind, die als "Phasen" bezeichnet werden. Nachdem jede Phase der Reihe nach erregt ist, dreht sich der Motor um einen Schritt.
Über einen Computer kann die Position des Motors eingestellt und / oder seine Drehzahl geregelt werden. Aus diesem Grund werden sie für viele Präzisionsbewegungssteuerungsanwendungen ausgewählt.
Schrittmotoren gibt es in einer Vielzahl von Größen und Ausführungen sowie elektrischen Parametern. Dieser Leitfaden deckt alles ab, was Sie wissen müssen, wenn Sie den richtigen Motor für sich auswählen.
Schrittmotor - Diagramm:
Einpoliger 4-Phasen-Motor
Animation aus Wikipedia
Wo können Schrittmotoren eingesetzt werden?
- Positionierung - Diese Motoren bewegen sich mit definierten, sich wiederholenden Hüben, sodass sie am besten für Anwendungen geeignet sind, die eine präzise Positionierung erfordern, z. B. 3D-Drucker , CNC, Kameraplattformen und XY-Plotter. Einige Plattenlaufwerke verwenden auch Schrittmotoren, um die elektromagnetischen Köpfe zu positionieren.
- Geschwindigkeitsregulierung - präzise Bewegungssteigerung ermöglicht eine perfekte Kontrolle der Rotation im Automatisierungs- und Robotikprozess.
- Niedriges Drehmoment - Standard-DC-Motoren haben kein hohes Drehmoment bei niedriger Drehzahl. Im Gegensatz dazu hat ein Schrittmotor sein maximales Drehmoment bei niedriger Geschwindigkeit. Es ist also eine gute Wahl, wenn Sie einen Motor mit der oben genannten Geschwindigkeit und hoher Präzision suchen.

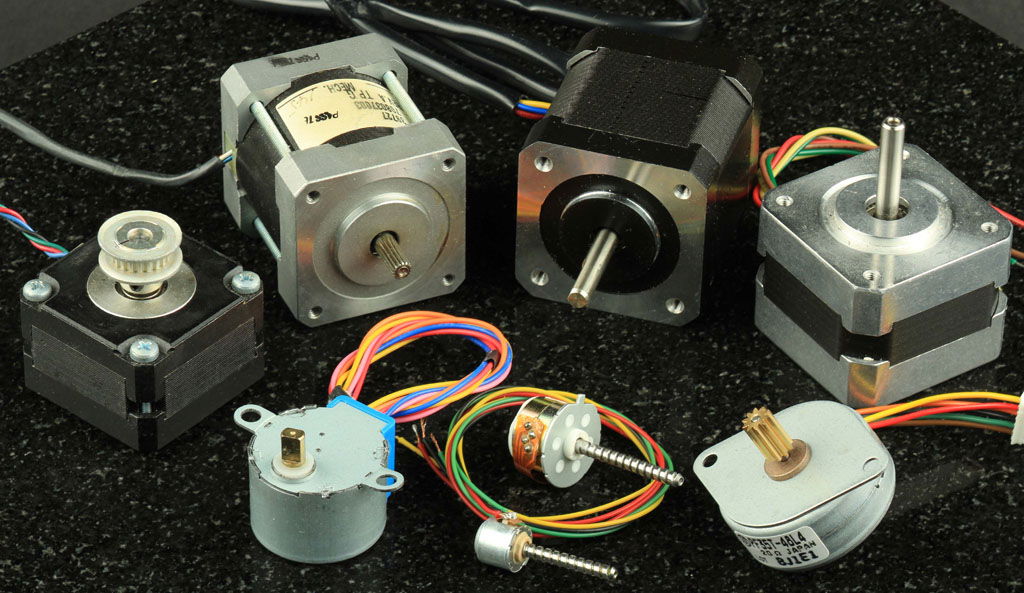
Schrittmotoren in verschiedenen Ausführungen
Was sind die Grenzen von Schrittmotoren?
- Geringer Wirkungsgrad - Stromaufnahme des Schrittmotors ist lastunabhängig. Sie verbrauchen den meisten Strom, wenn sie nicht verwendet werden. Aus diesem Grund neigen sie dazu, warm zu werden.
- Begrenztes hohes Drehmoment - Schrittmotoren haben ein geringeres Drehmoment, nicht bei niedrigen, sondern bei hohen Drehzahlen. Einige von ihnen sind für hohe Geschwindigkeiten optimiert. Um diese zu erreichen, müssen sie mit dem entsprechenden Treiber gekoppelt werden.
- Kein Feedback – Im Gegensatz zu Servomotoren haben die meisten Schrittmotoren kein integriertes Positionsfeedback. Durch die Aktivierung von "Open Loop" kann jedoch eine hervorragende Genauigkeit erreicht werden. Endschalter oder Haussensoren werden in der Regel zur Sicherheit und/oder zur Festlegung einer Referenzposition benötigt.
Arten von Schrittmotoren
Es gibt eine große Auswahl an Schrittmotoren , von denen einige sehr spezialisierte Treiber erfordern. In unserem Tutorial konzentrieren wir uns nur auf diejenigen, die mit allgemein verfügbaren Treibern arbeiten können. Sie sind: Permanentmagnetmotor oder Hybridmotor, zweiphasig bipolar oder vierphasig unipolar.
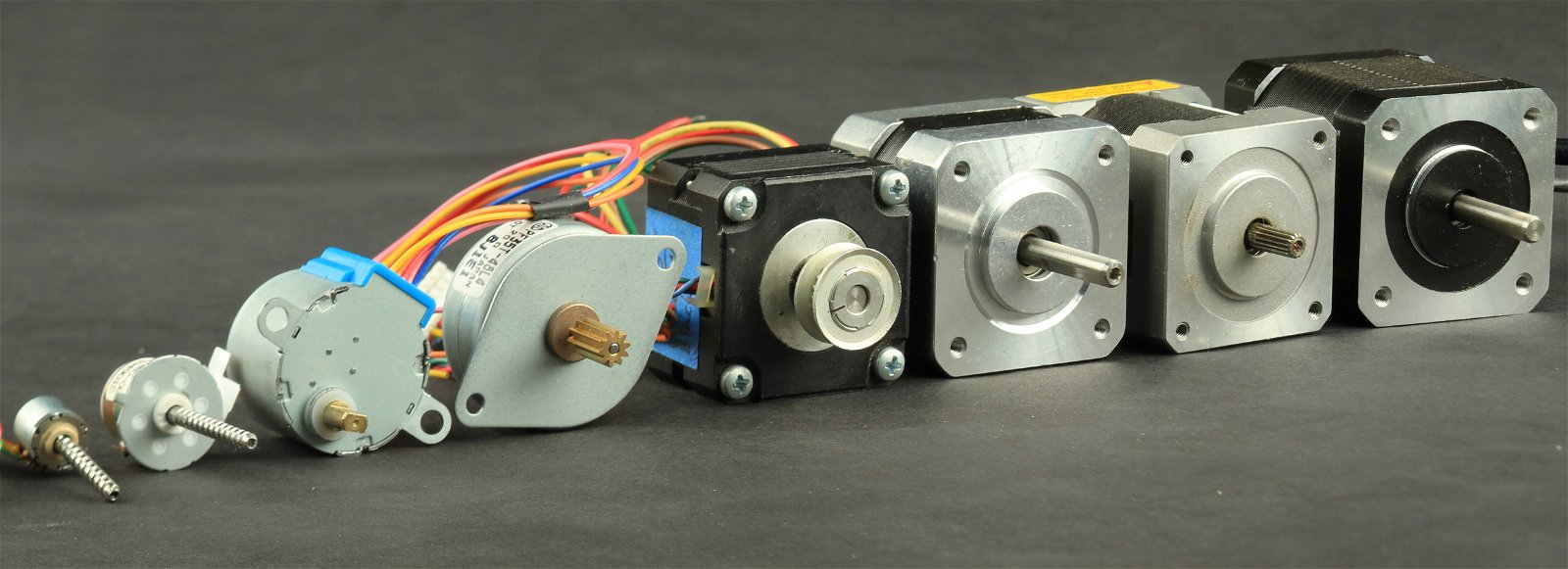
Arten von Schrittmotoren
Schrittmotor - Motorgröße
Eines der ersten Dinge, die zu berücksichtigen sind, ist die Arbeit, die der Motor leisten muss. Sie können sich vorstellen, dass die größeren mehr Leistung liefern können. Schrittmotoren können kleiner als eine Mutter sein, aber sie sind auch so groß wie der NEMA 57.
Die meisten von ihnen haben eine Drehmomentangabe. Darauf müssen Sie achten, wenn Sie entscheiden, ob ein Motor genug Leistung hat.
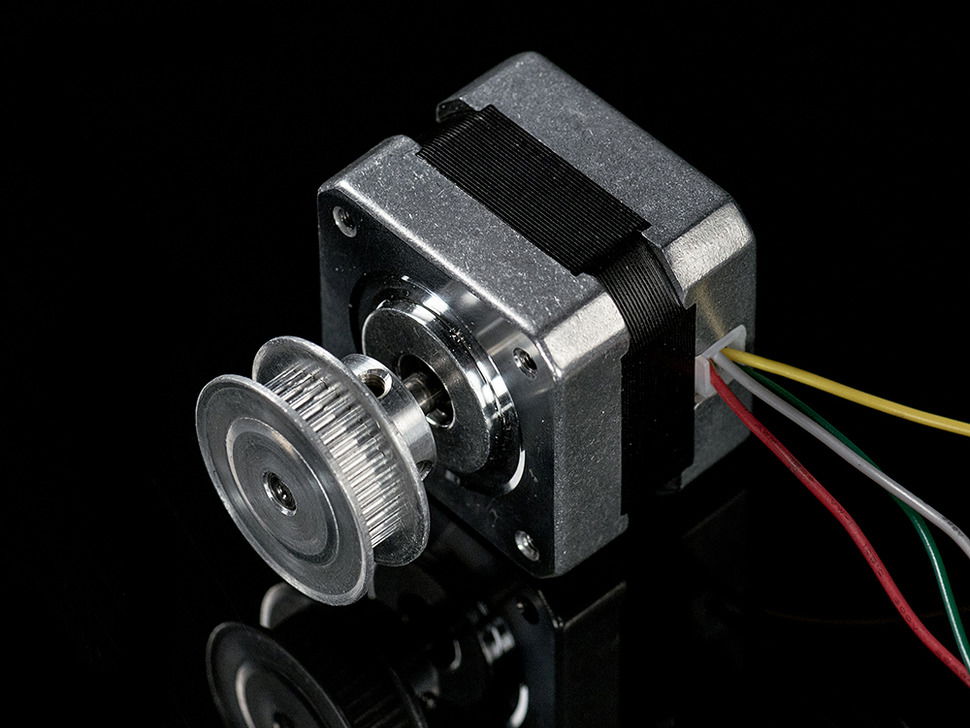
Der NEMA 17 ist ein Motor mit typischer Größe, der in 3D-Druckern und kleineren CNC-Fräsmaschinen verwendet wird. Kleine Motoren werden in vielen Roboter- und Animatronic-Projekten verwendet. Größere NEMA-Motoren werden typischerweise in CNC-Maschinen verwendet und in der Industrie eingesetzt.
Die NEMA-Nummern stellen die Standardabmessungen der Frontplatte für die Motormontage dar. Sie definieren nicht seine anderen Parameter. Die zwei verschiedenen NEMA 17-Motoren haben völlig unterschiedliche elektrische oder mechanische Spezifikationen. Sie sind nicht austauschbar.
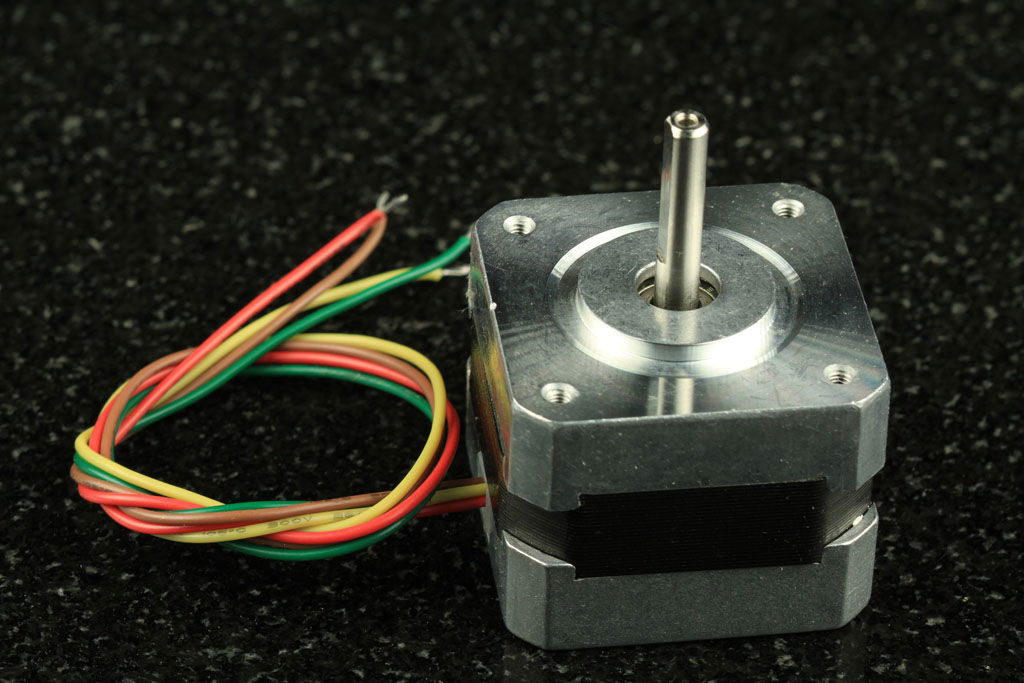
NEMA17-Schrittmotor
Schrittzähler
Als nächstes ist die erforderliche Positionierungsauflösung zu beachten. Die Anzahl der Schritte pro Umdrehung reicht von 4 bis 400. Gängige Schrittzähler sind 24, 48 und 200.
Die Auflösung wird oft in Grad pro Schritt ausgedrückt. Der 1,8 °-Motor ist der gleiche wie der 200-Schritte-pro-Umdrehung-Motor.
Der Kompromiss der hohen Auflösung ist Geschwindigkeit und Drehmoment. Motoren mit einer großen Anzahl von Schritten arbeiten bei niedrigeren Drehzahlen besser. Höhere Drehzahl führt zu geringerem Drehmoment.
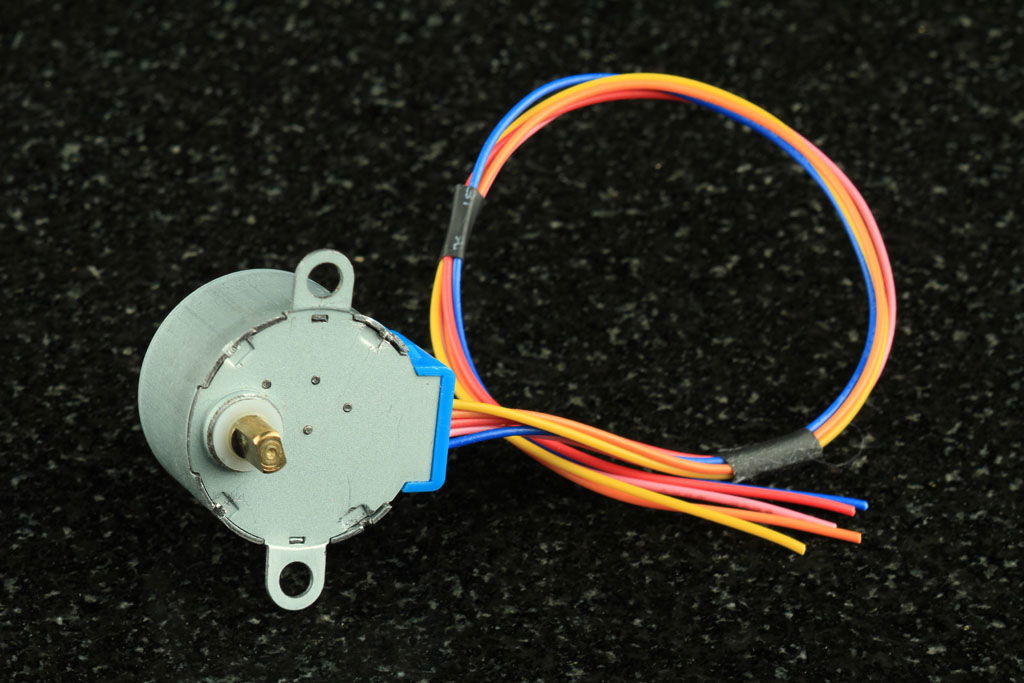
Kleiner Schrittmotor
Gang
Eine andere Möglichkeit, eine hohe Positionsauflösung zu erreichen, ist die Verwendung von Zahnrädern. Die Wirkung der Verwendung eines 32: 1-Getriebes auf den Ausgang eines Motors, der 8 Schritte pro Umdrehung dreht, ist ein 512-Schritt-Motor.
Das Getriebe erhöht auch das Motordrehmoment. Einige winzige Getriebeschrittmotoren haben erstaunliche Drehmomente. Aber der Kompromiss ist natürlich die Geschwindigkeit. Getriebeschrittmotoren werden typischerweise in Projekten mit niedriger Drehzahl verwendet.
Schrittmotor mit Zahnrad
Wellenstil
Ein weiteres Problem, das Ihre Aufmerksamkeit verdient, ist die Zusammenarbeit des Motors mit dem Rest des Antriebsstrangs. Es sind verschiedene Wellenformen erhältlich:
- "D"- oder Rundschaft - diese sind in einer Vielzahl von Standarddurchmessern erhältlich. Viele Riemenscheiben und Zahnräder sowie Wellengelenke sind passend konstruiert. Die abgeflachte Seite der Wellen „D“ verhindert ein Durchrutschen. Sie sind diejenigen, die für hohe Drehmomente empfohlen werden.
- Getriebewelle - einige Wellen haben gefräste Verzahnungen. Sie sind in der Regel für den Einsatz mit modularen Zahnradsätzen ausgelegt.
- Kardanwelle – Kardanwellenmotoren werden zum Bau von Linearantrieben verwendet. Ihre Miniaturversionen sind Kopfpositionierer in Plattenlaufwerken.
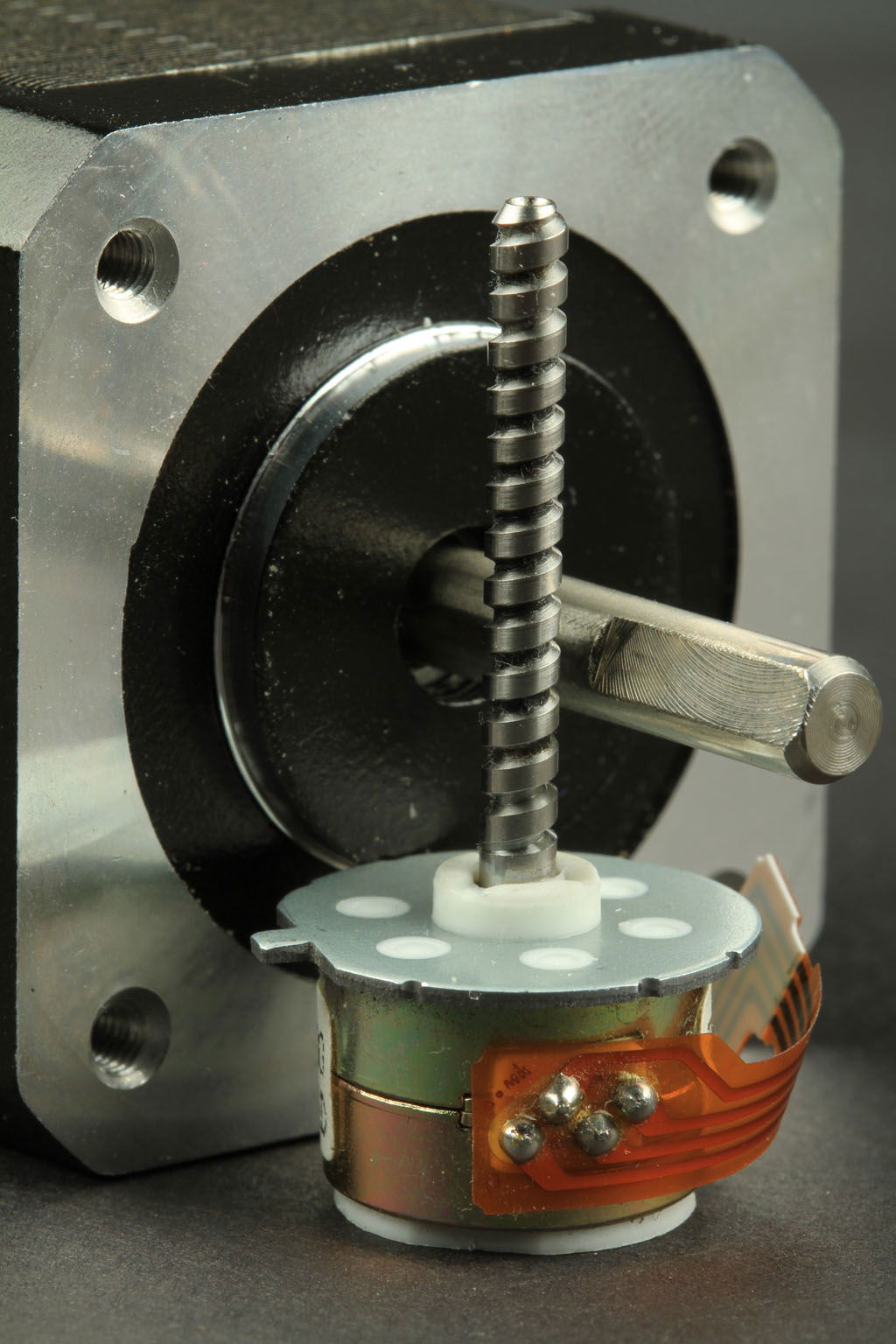
Schrittmotoren mit verschiedenen Arten von Wellen
Verdrahtung
Es gibt viele Arten von Verdrahtungen in Schrittmotoren. Wir werden uns auf diejenigen konzentrieren, die mit allgemein erhältlichen Treibern betrieben werden können. Sie sind Permanentmagnet- oder Hybridmotoren, die als 2-Phasen-Bipolar oder als 4-Phasen-Unipolar verdrahtet sind.
Schrittmotor verdrahtung
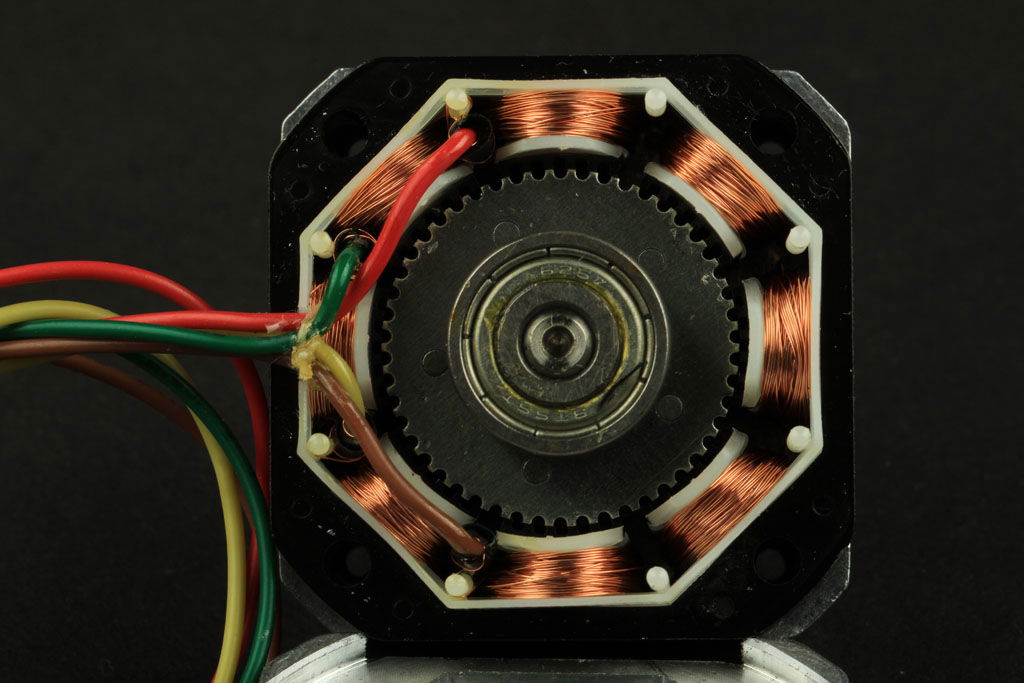
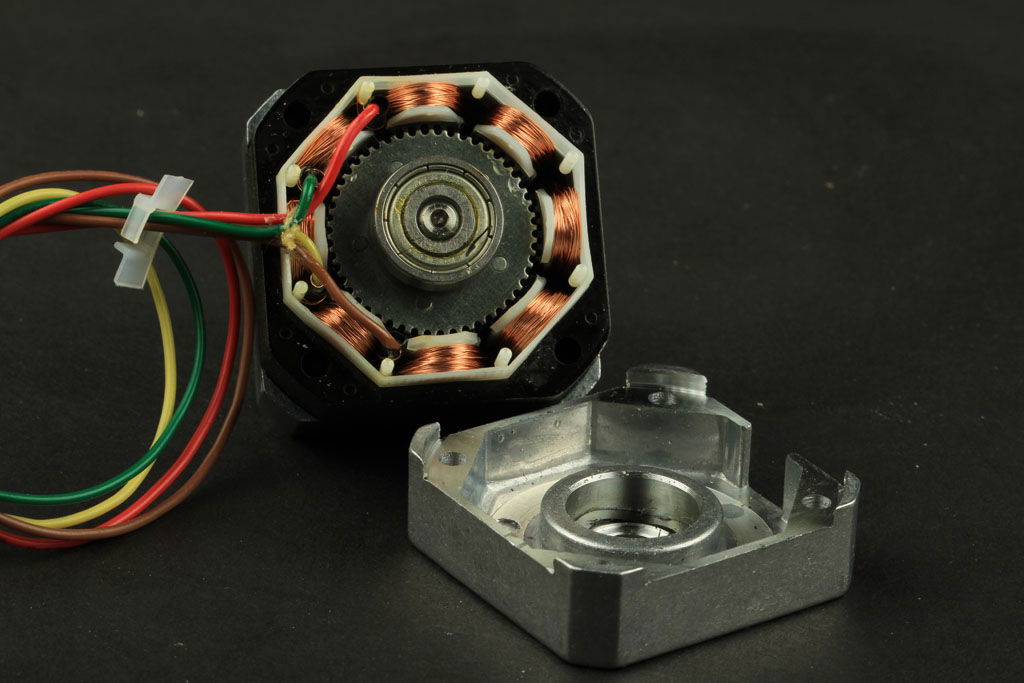
Spulen und Phasen
Ein Schrittmotor kann beliebig viele Spulen haben. Sie werden jedoch in Gruppen zusammengefasst, die als "Phasen" bezeichnet werden. Alle Spulen in Phase werden zusammen erregt.
Schrittmotorphasen
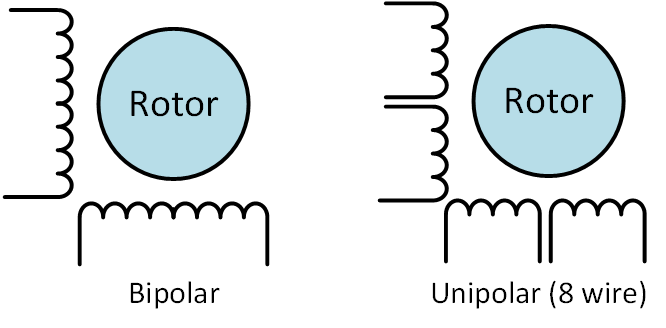
Unipolarer Schrittmotor VS bipolarer Schrittmotor
Der unipolare Treiber (unipolarer Motor) versorgt die Phasen immer auf die gleiche Weise. Ein "gemeinsamer" Draht wird immer negativ geladen sein. Der zweite wird positiv geladen. Diese Treiber können mit einfachen Transistorschaltungen implementiert werden. Sein Nachteil ist, dass es weniger Drehmomente hat, da nur die Hälfte der Spulen gleichzeitig bestromt werden kann.
Ein bipolarer Treiber (bipolarer Motor) verwendet ein H-Brücken- System, um den Stromfluss phasenweise umkehren zu können. Indem sie mit wechselnder Polarität gespeist werden, beginnen alle Spulen zu arbeiten und schalten gleichzeitig den Motor ein.
Der Zweiphasen-Bipolarmotor hat 2 Spulengruppen. Ein 4-phasiger unipolarer Motor hat solche Gruppen 4. Ein 2-phasiger bipolarer Motor hat 4 Drähte - 2 für jede Phase. Einige Motoren haben eine flexible Verdrahtung, die es ermöglicht, den Motor im unipolaren oder bipolaren Modus zu starten.
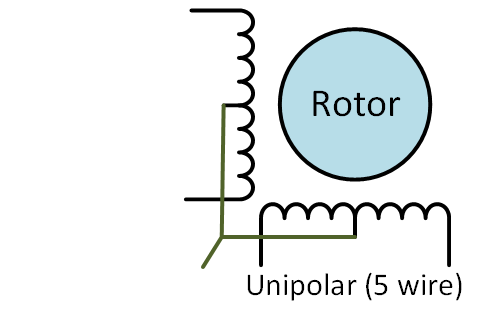
Unipolar, 5-adrig
5-Leiter-Motor
Alle gängigen Spulenleiter sind in der Mitte verbunden und treten als Leiter aus. Ein solcher Motor kann nur im unipolaren Modus arbeiten.
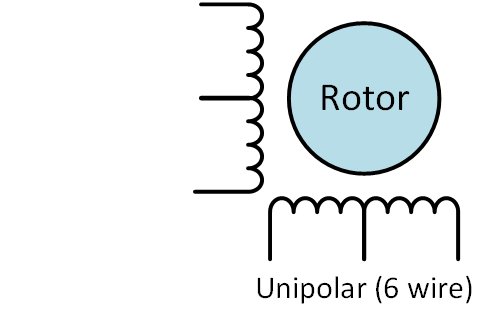
Unipolar, 6-adrig
6-Leiter-Motor
Es verbindet nur die gemeinsamen Drähte von 2 gepaarten Phasen. Die Drähte können verbunden werden, um einen unipolaren 5-Draht-Motor zu erstellen.
Sie können den Motor auch bipolar verwenden, ohne auf die Drähte zu achten.
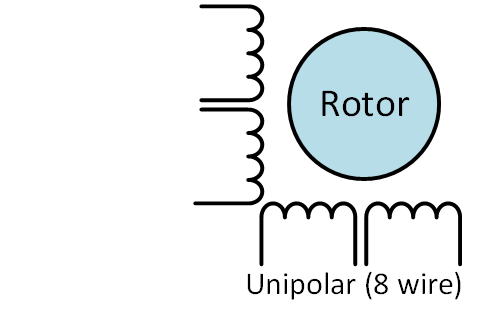
Unipolar, 8-adrig
8-Leiter-Motor
Dieser unipolare Motor ist der universellste von allen. Es kann auf viele Arten gefahren werden:
- 4-phasig unipolar - alle gemeinsamen Adern sind angeschlossen - wie bei einem 5-adrigen Motor.
- Standardmäßig 2-phasig bipolar - die Phasen sind in Reihe geschaltet - wie bei einem 6-Leiter-Motor
- 2-phasig bipolar parallel - die Phasen sind parallel geschaltet. Dies führt zu halbiertem Widerstand und halber Induktivität - benötigt jedoch doppelt so viel Strom zum Betrieb. Der Vorteil dieser Schaltung ist ein höheres Drehmoment und eine maximale Drehzahl.
Zusammenfassung der Schrittmotoren
Schrittmotorsteuerung
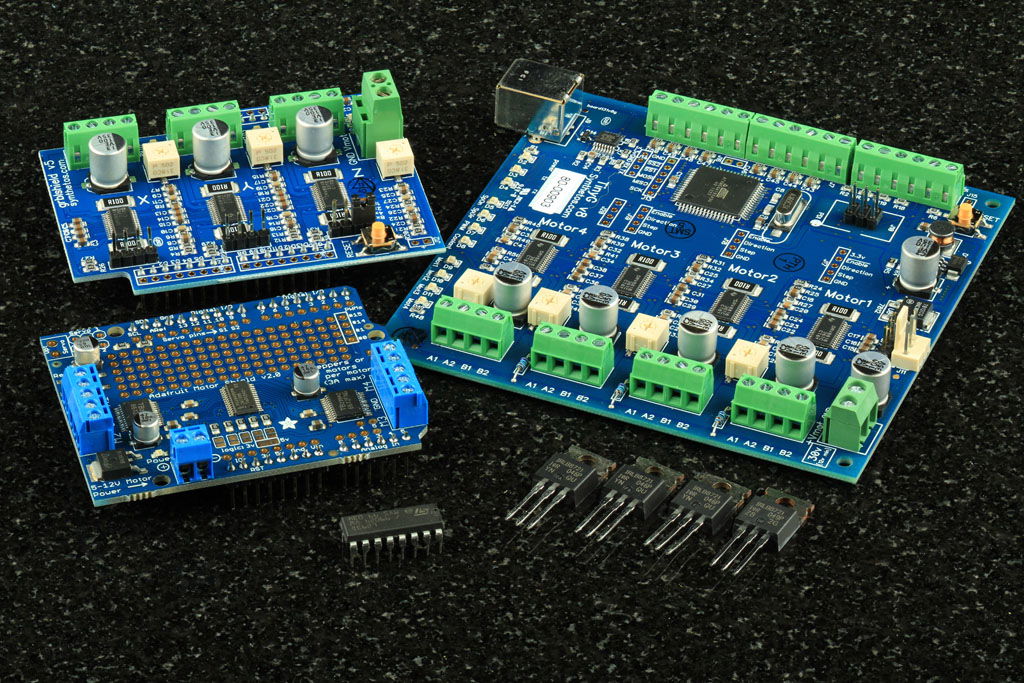
Treiber für Schrittmotoren
Schrittmotoren - Steuerungen - Ein Schrittmotor ist etwas komplizierter zu verwenden als ein Standard-DC-Bürstenmotor. Schrittmotoren müssen einen eigenen Treiber haben, um die Phasen in der richtigen Reihenfolge liefern zu können, die somit den Motor antreiben.
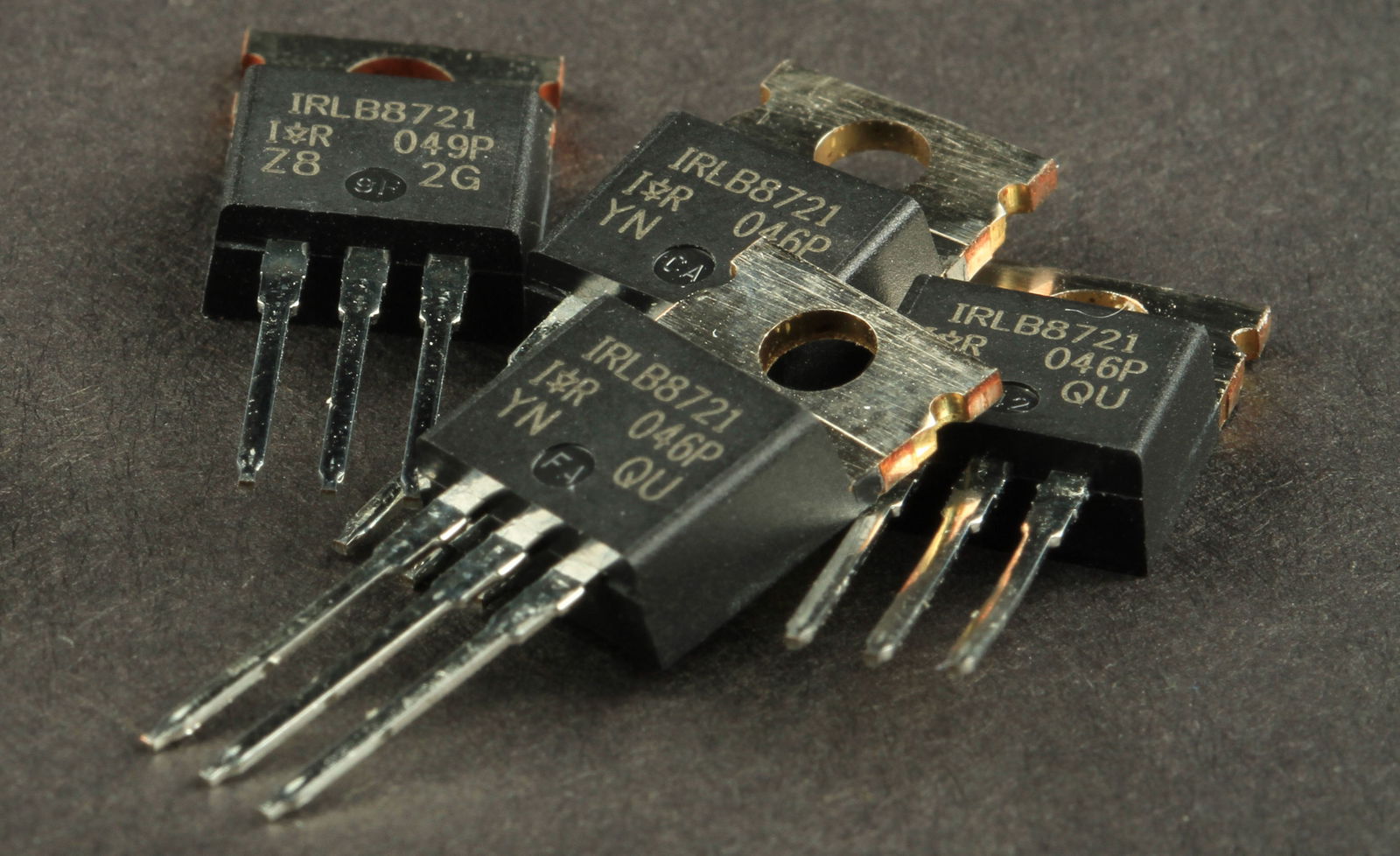
Transistoren
Schrittmotor - Steuerung - Einfacher unipolarer Treiber
Der einfachste Treibertyp kann mit einer kleinen Anzahl von Transistoren aufgebaut werden. Sie werden nacheinander ein- und ausgeschaltet, um die Phasen zu erregen und den Motor zu starten. Der Bau solcher Treiber ist relativ günstig, aber sie funktionieren nur mit unipolaren Motoren. Ein Tutorial zum Erstellen eines solchen Treibers finden Sie auf der Arduino-Website.
| Anleitung zur Steuerung des unipolaren Schrittmotors |
Schrittmotortreiber - integrierte Schaltung
Einfacher zweikanaliger H-Brückentreiber
Die Verwendung eines bipolaren Motors erfordert 2 vollständige H-Brücken, damit der Strom zu den Phasen zurückkehrt. Aber sie von Grund auf neu zu bauen, kann schwierig sein. Es sind viele H-Brücken-Layouts verfügbar, die dies erleichtern können.
Der L293D ist einer der beliebtesten und kostengünstigsten Chipsätze. Es ist in den Sockeln der meisten Scheibenmotoren der ersten Generation zu finden.
Im Arduino Learning System finden Sie ein tolles Tutorial zur Verwendung des L293D mit einem Arduino :
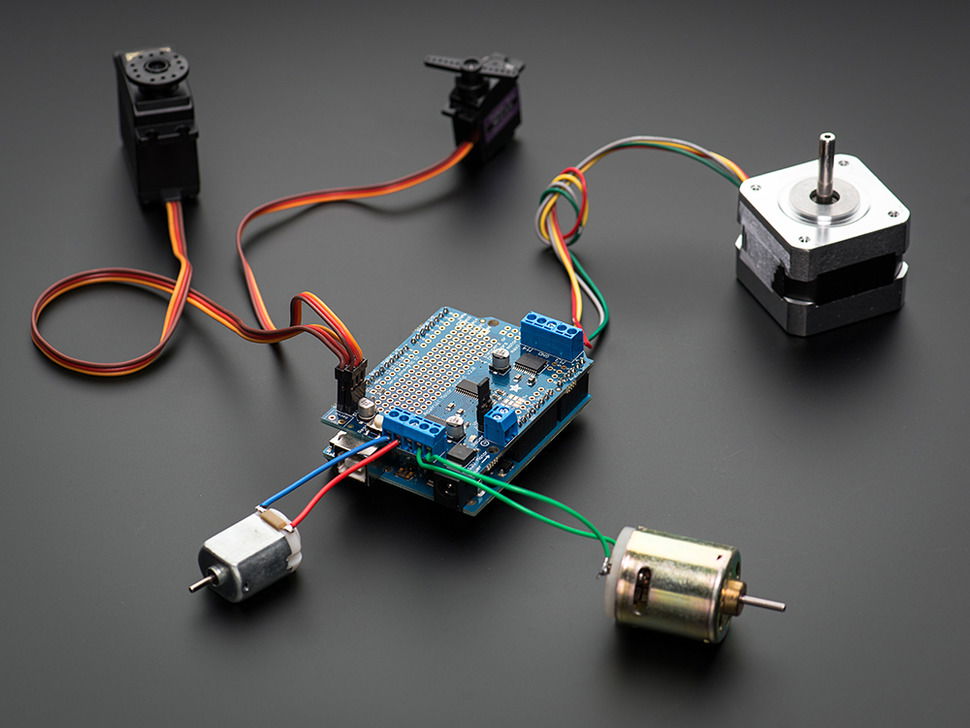
Shield Adafruit Motor Shield V2 mit Arduino und angeschlossenen Motoren
Adafruit Motorschild V2
Adafruit Motor Shield V2 ist eine große Verbesserung gegenüber den grundlegenden L239D-basierten Treibern. V2 verwendet zwei TB6612-MOSFET-Treiber. Im Vergleich zum L293D bietet der TB6612 die doppelte Stromeffizienz und deutlich geringere Spannungsabfälle, was die Nutzung des Schrittmotors verbessert.
Dank 2 Steuerungssystemen und 4 H-Brücken kann jedes Modul bis zu zwei Motoren antreiben. Die Steuerungssysteme werden über das PWM-Steuerungssystem mit der I2C-Schnittstelle verbunden. Dadurch werden viele GPIO-Pins frei, die für etwas anderes verwendet werden können, und die Kappen können übereinander gestapelt werden. Sie können bis zu 32 Pads anordnen, die bis zu 64 Motoren mit 2 IO-Pins steuern.
Alle Informationen zu diesem Treiber finden Sie im Lehrsystem.
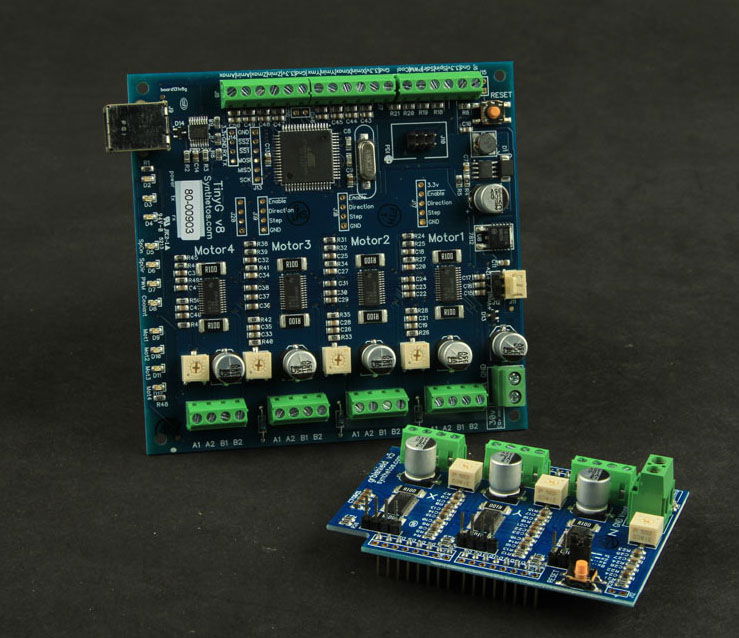
CNC-Steuerung
Fortschrittliche CNC-Steuerungen
CNC gShield- und TinyG-Steuerplatinen bringen Sie der Schrittmotorleistung auf industriellem Niveau näher. Sie zeichnen sich durch DC-Treiber aus, die "Chopper" genannt werden. Sie können eingestellt werden, um das maximale Drehmoment und die maximale Drehzahl des Motors bereitzustellen.
TinyG CNC verfügt über ein G-Code-Interpreterprogramm und 4 Motorausgänge auf der Platine. Dadurch verfügen kleine und mittelgroße 4-Achsen-CNC-Maschinen über eine vollständige Embedded-Lösung.
Diese fortschrittlichen Hochleistungseinsätze sind jedoch komplexer und werden erfahrenen Benutzern empfohlen.
Informationen zu diesen Kacheln und ihrer Funktionsweise finden Sie im TinyG-Wiki und in den Synthetos-Foren.
Anpassen des Treibers an den Schrittmotor
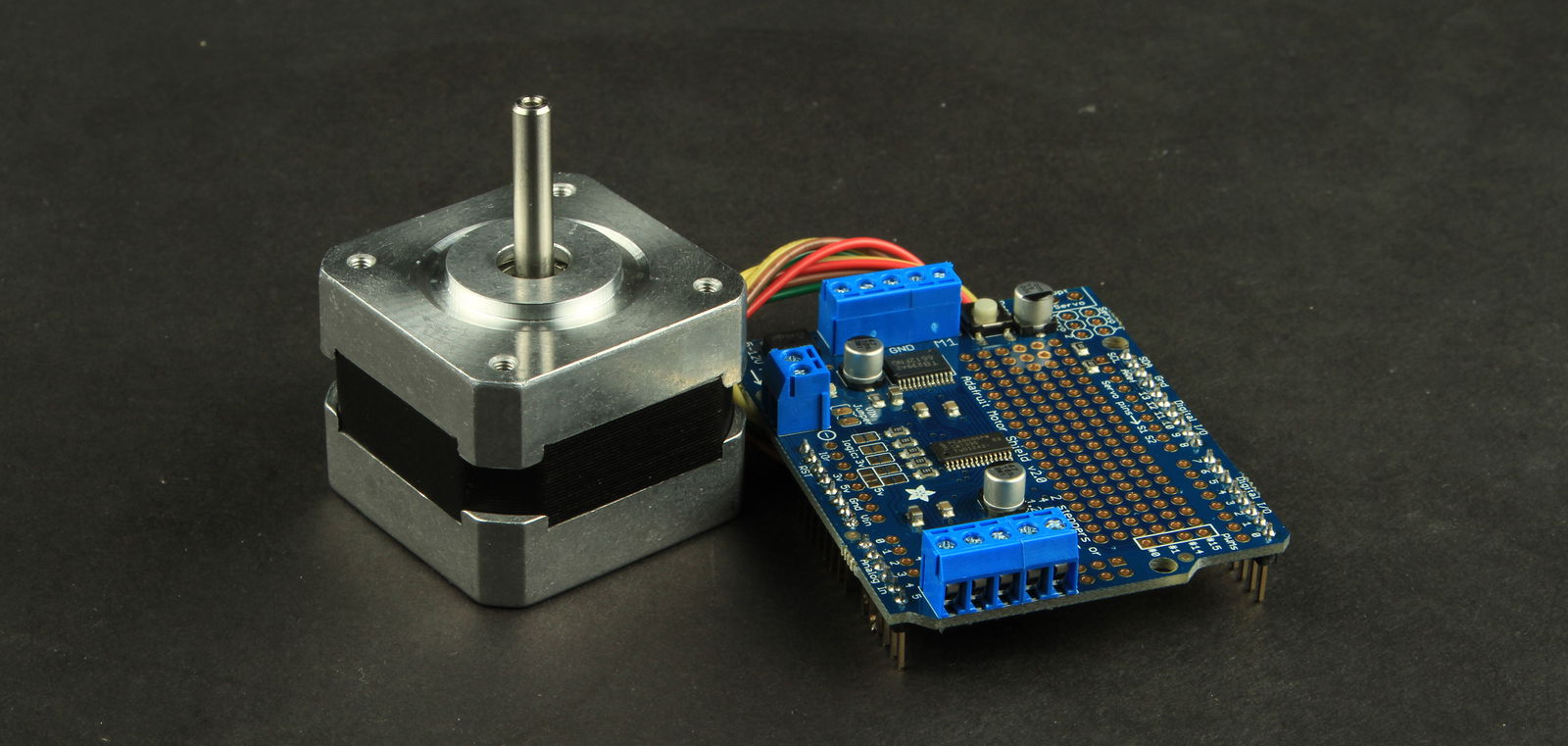
Schrittmotor an die Steuerung angeschlossen
Kommen wir nun zum wichtigsten Teil: Stellen Sie sicher, dass Motor und Treiber miteinander kompatibel sind.
Das Ergebnis ihrer falschen Auswahl kann eine unbefriedigende Leistung und noch schlimmer eine Beschädigung des Motors und / oder der Steuerung sein.
Wenn Sie sich falsch entscheiden, können Sie auf Folgendes stoßen:
Machen Sie sich mit den Parametern des Treibers vertraut
Die beiden wichtigsten Parameter des Treibers sind:
- Spannung - maximale Spannung, die dem Motor zugeführt werden kann
- Dauerstrom - der maximale Dauerstrom, der dem Motor zugeführt werden kann
|
Spitzenströme gelten nicht für Schrittmotoren. Verwenden Sie immer Nenndauerstrom |
Wie überprüfe ich einen Schrittmotor? - Machen Sie sich mit den Motorparametern vertraut
Sie müssen auch die Motorparameter kennen. Es gibt 2 wichtige Parameter:
- Ampere pro Phase - dies ist der maximale Strom, den die Motorwicklung ohne Überhitzung verarbeiten kann
- Widerstand pro Phase - Dies ist der elektrische Widerstand für jede Phase
Die Nennspannung wird normalerweise angegeben. Sie werden anhand der beiden oben genannten Parameter berechnet - aber nicht immer. Eine bessere Lösung ist, sie selbst zu berechnen, ebenfalls unter Verwendung der oben genannten Faktoren, aber im Ohmschen Gesetz.
Folge dem Gesetz!
Schrittmotorphasen sind Induktivitäten, die keinen abrupten Änderungen des Stromflusses unterliegen. Aber am Ende jedes Hubs oder in Abwesenheit von Bewegung verhalten sie sich wie eine Widerstandslast und gemäß dem Ohmschen Gesetz .
Der Motor zieht am meisten Strom, wenn er nicht läuft. Das Ohmsche Gesetz ermöglicht die Verwendung von Motorparametern zur Berechnung des vom Fahrer benötigten Stroms.
Spannung = Strom x Widerstand
oder
Strom = Spannung / Widerstand
| Diese Formeln sollten bei allen Dauerstrom-Schrittmotortreibern strikt angewendet werden. Dies gilt auch für die V1- und V2-Motorabdeckungen von Adafruit und praktisch alle anderen L293D-basierten Controller. |
Einige Motoren haben jedoch einen sehr geringen Spulenwiderstand. Daher führt die Verwendung dieser Formeln dazu, dass die Spannung weniger als 5 V beträgt und die Leistung unbefriedigend ist. Dieser Motortyp passt nicht in einen Konstantspannungstreiber und erfordert eine spezialisiertere Steuerung.
Willst du das Gesetz brechen?
Wenn es um das Ohmsche Gesetz geht, hat es noch nie jemand getan. Versuchen Sie es nicht einmal, oder es wird tödlich enden. Allerdings sind hier auch andere Gesetze am Werk. Die Gesetze von Lenz, Faraday und Ohm helfen Ihnen, die Effizienz Ihres Motors zu steigern.
Schrittmotorspulen erzeugen ein Magnetfeld, wenn sie erregt werden. Nach dem Faradayschen Gesetz ist Das sich ändernde Magnetfeld bewirkt, dass der Strom in der Spule fließt. Und nach dem Lenzschen Gesetz fließt dieser Strom in die entgegengesetzte Richtung zum Strom und erzeugt ein Magnetfeld. Dieser Rückstrom ist als "umgekehrte elektromotorische Kraft" oder umgekehrte EMF bekannt.
Diese Kraft erhöht die „ Impedanz “ oder erhöht den Widerstand der Spule. Das Ohmsche Gesetz gilt also immer noch - aber nur für die Impedanz, nicht für den einfachen Phasenwiderstand. Zu Beginn jedes Hubs begrenzt die Impedanz den Stromfluss durch die Spule.
CNC-Steuerung
Chopper-Antriebe
Der Chopper-Antrieb oder Dauerstrom gleicht die Gegen-EMK aus, die den Motor mit einer höheren Spannung antreibt. Das Betreiben der Schrittmotoren mit einer um ein Vielfaches höheren Spannung als die Nennspannung mit einem Chopper-Antrieb ist normal.
Bei solch hohen Spannungen müssen Sie auf Sicherheit achten. Zu diesem Zweck überwacht der Chopper-Antrieb auch den Strom, der dem Motor zugeführt wird, und "schneidet" ihn, bevor er den ursprünglich eingestellten Wert überschreitet.
Beginnend mit höheren Spannungen kann unser Controller zu Beginn des Hubs mehr Strom an die Spulen liefern und gleichzeitig das verfügbare Drehmoment erhöhen. Außerdem ermöglicht es höhere Maximalgeschwindigkeiten.
Sie müssen verstehen, wie der Motor und die Steuerung funktionieren, wenn Sie eine Chopper-Steuerung auswählen und mit einem bestimmten Motor konfigurieren möchten.
FAQ
Funktioniert dieser Motor mit meiner Kappe?
Sie müssen die Parameter des Motors und der Steuerung überprüfen. Gehen Sie dann zum Abschnitt " Anpassen des Treibers an den Schrittmotor " und prüfen Sie, ob sie kompatibel sind.
NEMA 17 sollte funktionieren ... richtig?
Die NEMA-Größe bestimmt nur die Größe der Montagefrontplatte. Um herauszufinden, ob es konform ist, müssen Sie die elektrischen Parameter des Motors kennen.
Schrittmotorauswahl – Welche Motorgröße sollte ich für mein Projekt wählen?
Die meisten Motoren haben Drehmomentangaben – normalerweise in Zoll/oz oder Newton/Zentimeter. Ein Newton / Zentimeter bedeutet, dass der Motor eine Kraft von einem Newton pro Zentimeter von der Mitte der Welle ausüben kann. Beispielsweise kann es bei Verwendung einer Riemenscheibe mit einem Durchmesser von 2 Zentimetern einer Kraft von einem Newton standhalten.
Achten Sie bei der Berechnung des Drehmoments darauf, das zusätzliche Drehmoment zu berücksichtigen, das für die Beschleunigung und zur Überwindung der Reibung erforderlich ist. Es braucht mehr Drehmoment, um etwas aufzunehmen, als es zu halten.
Wenn Ihr Projekt ein hohes Drehmoment, aber eine niedrige Geschwindigkeit erfordert, sehen Sie sich den Getriebeschrittmotor an.
Wie schließe ich den Motor an den Schirm an?
Überprüfen Sie die Spezifikation der Motoren, falls vorhanden.
Schrittmotor-Netzteil - Funktioniert dieses Netzteil mit meinem Motor?
Stellen Sie zunächst sicher, dass die Nennspannung des Motorcontrollers nicht überschritten wird.
* Dies gilt nur für Konstantstromtreiber.
Arten von Schrittmotoren
Quelle: https://learn.adafruit.com/all-about-stepper-motors