





















































































































































































































































































Lektion 3: Lichtsensor
Zielsetzung
In dieser Lektion lernen Sie, wie Sie den Grove-Lichtsensor verwenden, um den Grove-Servo zu steuern. In diesem Fall ändert sich der Servodrehwinkel abhängig von der Lichtintensität.
Hardwareanforderung
Vorbereiten:
- microUSB-Kabel
- Raspberry Pi 3 Modell B
- Computer
Im Bausatz enthalten
- Grove-Base-Hut
- Grove-Schnur
- Grove - Lichtsensor
- Hain - Servo
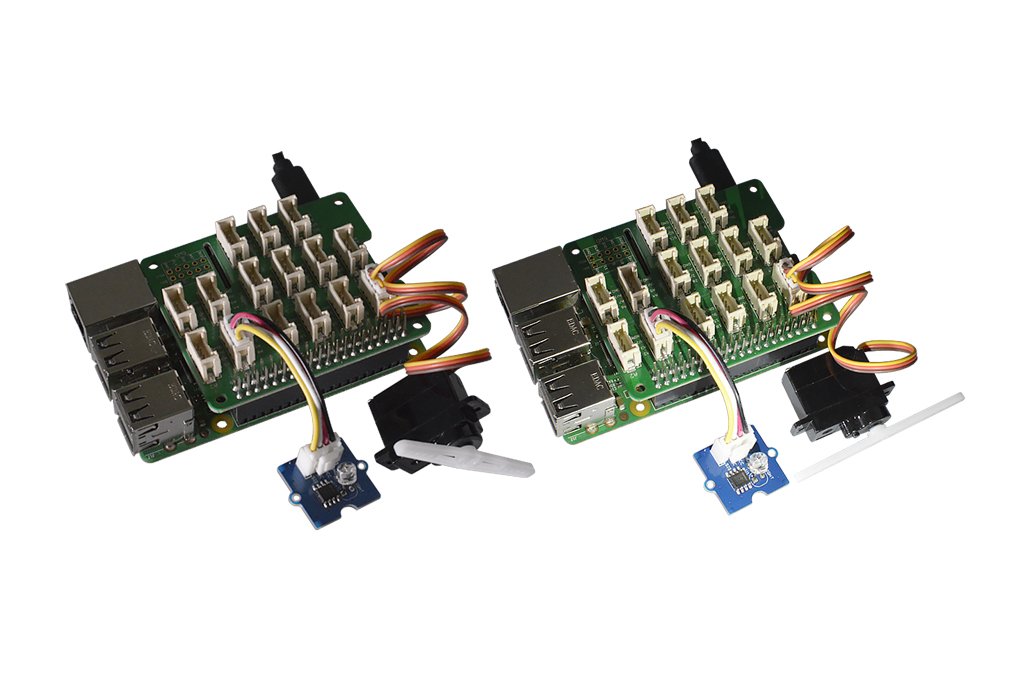
Anschließen der Geräte
Schritt 1 Schließen Sie Grove – Lichtsensor an A0-Port, Grove – Servo an PWM-Port an.
Schritt 2 Verbinden Sie den Base Hat mit dem Raspberry Pi.
Schritt 3 Verbinden Sie den Raspberry Pi über das microUSB-Kabel mit einer Stromquelle.
 Programmierung
Programmierung
Schritt 1 : Geben Sie die folgenden Befehle ein, um eine Python-Datei zu erstellen:
cd grove.py Nano-Lektion_3.py
Schritt 2 : Kopieren Sie den folgenden Code:
#! / usr / bin / env python
Importzeit
aus grove.grove_servo import GroveServo
aus grove.grove_light_sensor_v1_2 import GroveLightSensor
def main ():
# Grove - Servo an PWM-Port angeschlossen
Servo = GroveServo (12)
# Grove - Lichtsensor an Port A0 angeschlossen
Sensor = GroveLightSensor (0)
während wahr:
Winkel = Sensor.Licht * 180/1000
print ('Lichtwert {}, auf {} Grad drehen.'. Format (Sensor.Licht, Winkel))
servo.setAngle (Winkel)
time.sleep (1)
if __name__ == '__main__':
hauptsächlich ()
Schritt 3 : Führen Sie das Programm aus:
sudo chmod + x Lektion_3.py sudo ./lektion_3.py
Wenn alles erfolgreich ist, ändert eine Änderung der Lichtintensität den Drehwinkel des Servos.
pi @ raspberrypi: ~ /grove.py $ sudo ./lektion_3.py Lichtwert 300, auf 113 Grad drehen. Lichtwert 80, auf 80 Grad drehen. Lichtwert 166, auf 165 Grad drehen. Lichtwert 498, auf 132 Grad drehen. Lichtwert 601, auf 60 Grad drehen. Lichtwert 200, auf 21 Grad drehen. Lichtwert 459, auf 99 Grad drehen. Lichtwert 172, auf 173 Grad drehen. Lichtwert 319, auf 138 Grad drehen. ^ CTraceback (letzter Aufruf zuletzt): Datei "./lektion3.py", Zeile 23, inhauptsächlich () Datei "./lesson3.py", Zeile 20, in main time.sleep (1) KeyboardInterrupt pi @ himbeerpi: ~ / grove.py $