Lektion 4: Bewegungssensor und Relais
Zielsetzung
Verwenden Sie den Grove - Mini-PIR-Bewegungssensor, um Bewegungen zu erkennen und das Licht beim Vorbeigehen einzuschalten.
Hardwareanforderung
Vorbereiten:
- microUSB-Kabel
- Raspberry Pi 3 Modell B
- Computer
Im Bausatz enthalten
- Grove-Base-Hut
- Grove-Schnur
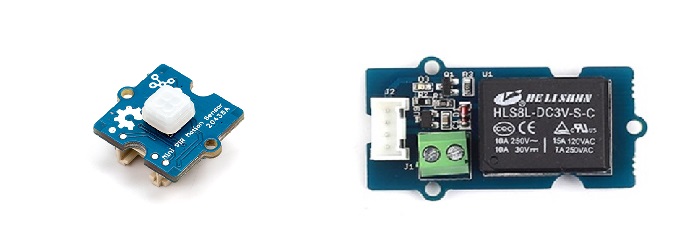
- Grove - Mini-PIR-Bewegungssensor
- Hain - Relais
Anschließen der Geräte
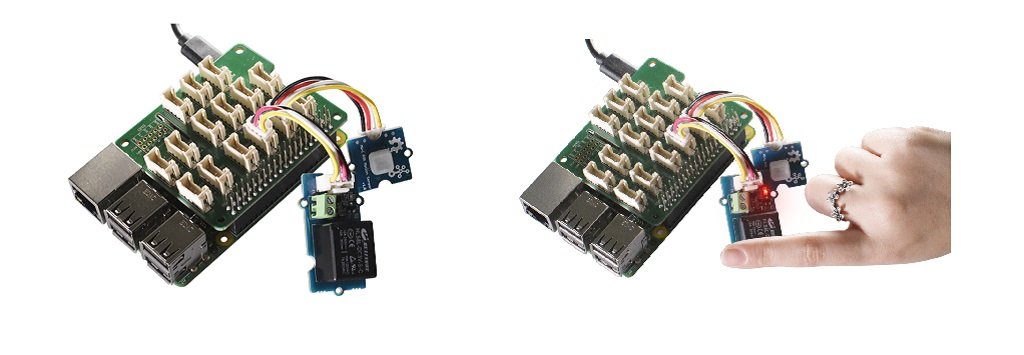
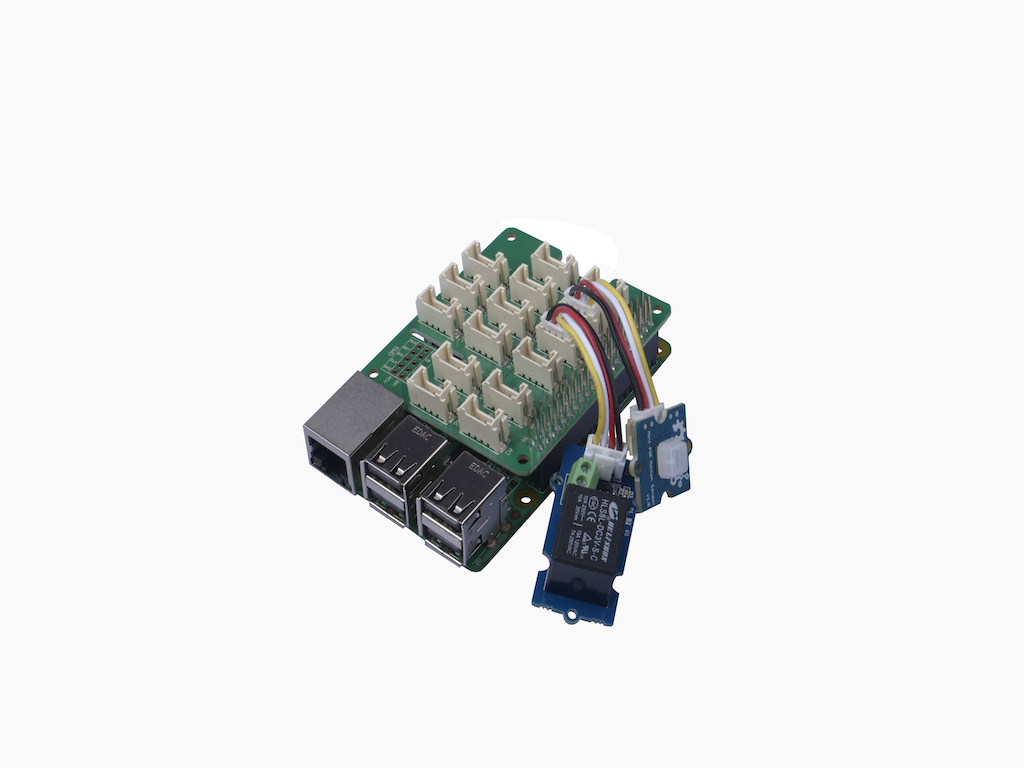
Schritt 1 Schließen Sie Grove – Mini-PIR-Bewegungssensor an Port D5, Grove – Relais an Port D16 am Base Hat an.
Schritt 2 Verbinden Sie den Base Hat mit dem Raspberry Pi.
Schritt 3 Verbinden Sie den Raspberry Pi über das microUSB-Kabel mit einer Stromquelle.
Programmierung
Beachtung Stellen Sie sicher, dass Sie die Repository-Bibliothek python.py auf Ihrem Raspberry Pi geklont haben. |
Schritt 1 : Geben Sie die folgenden Befehle ein, um eine Python-Datei zu erstellen
cd grove.py Nano-Lektion_4.py
Schritt 2 : Kopieren Sie den folgenden Code:
#! / usr / bin / env python
Importzeit
aus grove.grove_mini_pir_motion_sensor import GroveMiniPIRMotionSensor
aus grove.grove_relay import GroveRelay
def main ():
# Grove - Mini-PIR-Bewegungssensor an Anschluss D5 angeschlossen
Sensor = GroveMiniPIRMotionSensor (5)
# Grove - Relais an Port D16 angeschlossen
Relais = GroveRelais (16)
def on_detect ():
drucken ('Bewegung erkannt')
weitergeben ()
drucken ('Relais an')
time.sleep (1)
relais.aus ()
drucken ('Relais aus')
sensor.on_detect = on_detect
während wahr:
time.sleep (1)
if __name__ == '__main__':
hauptsächlich ()
Schritt 3 : Führen Sie das Programm aus:
sudo chmod + x Lektion_4.py sudo ./lektion_4.py
Wenn alles erfolgreich ist, sollten Sie sehen, dass das Relais ein / aus ist, wenn eine Bewegung erkannt wird.
pi @ raspberrypi: ~ /grove.py $ sudo ./lektion_4.py Bewegung erkannt weitergeben Relais ab Bewegung erkannt weitergeben Relais ab ^ CTraceback (letzter Aufruf zuletzt): Datei "./lektion_4.py", Zeile 33, inhauptsächlich () Datei "./lektion_4.py", Zeile 30, im Hauptverzeichnis time.sleep (1) KeyboardInterrupt pi @ himbeerpi: ~ / grove.py $