






















































































































































































































































































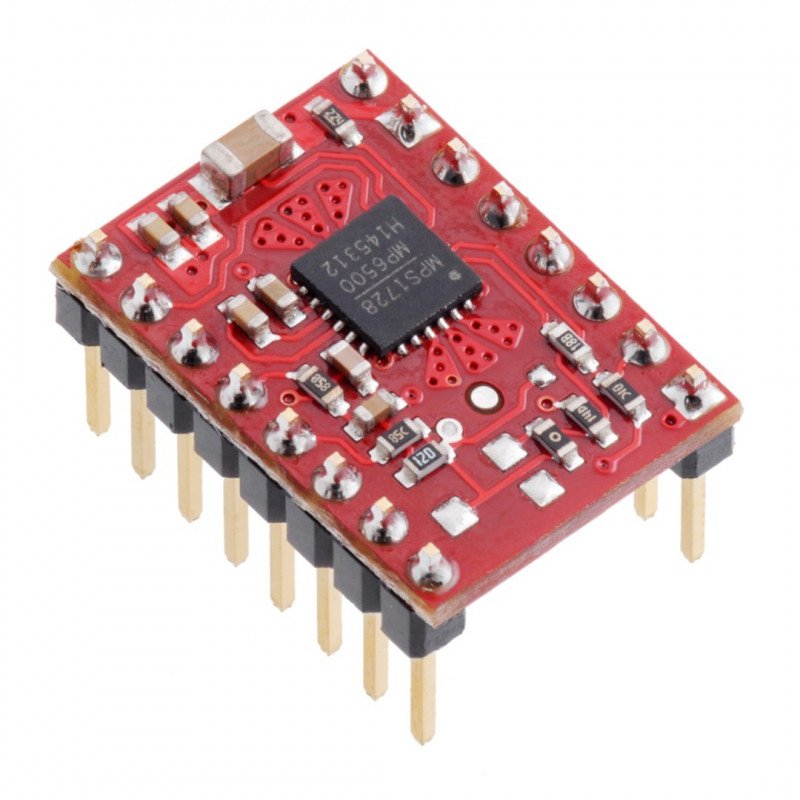








Schrittmotortreiber basierend auf dem MP6500 -System. Es wird mit einer Spannung von 4,5 V bis 35 V betrieben, mit einer maximalen Stromaufnahme von 2 A pro Spule. Maximale Auflösung: 1/8 Schritt. Das Modul erlaubt den Stromfluss bis 1,8 A ohne Kühlkörper. Der Strom wird digital gesteuert. Das Modul in einer Version mit angelöteten Goldpin-Anschlüssen.
Das System ermöglicht es Ihnen, einen Schrittmotor mit einem Gerät zu steuern, mit dem Sie logische Zustände erzeugen können, z. B. Arduino , STM32Discovery , Raspberry Pi oder einen beliebigen Mikrocontroller . Das Pololu-Modul ist sehr einfach zu bedienen. Um den Motor um einen Schritt zu drehen, müssen Sie den High-Zustand am STEP-Pin eingeben (logische Eins), die nächste Folge von Nullen und Einsen bewegt den Motor um einen Schritt usw. im Uhrzeigersinn, High-Zustand - im Gegenteil). Die Steuerung hat auch die Möglichkeit, die Auflösung des Motorbetriebs auszuwählen.
Das Modul hat gelötete Goldpin-Anschlüsse. Wir bieten auch eine Version ohne installierte Konnektoren an . |
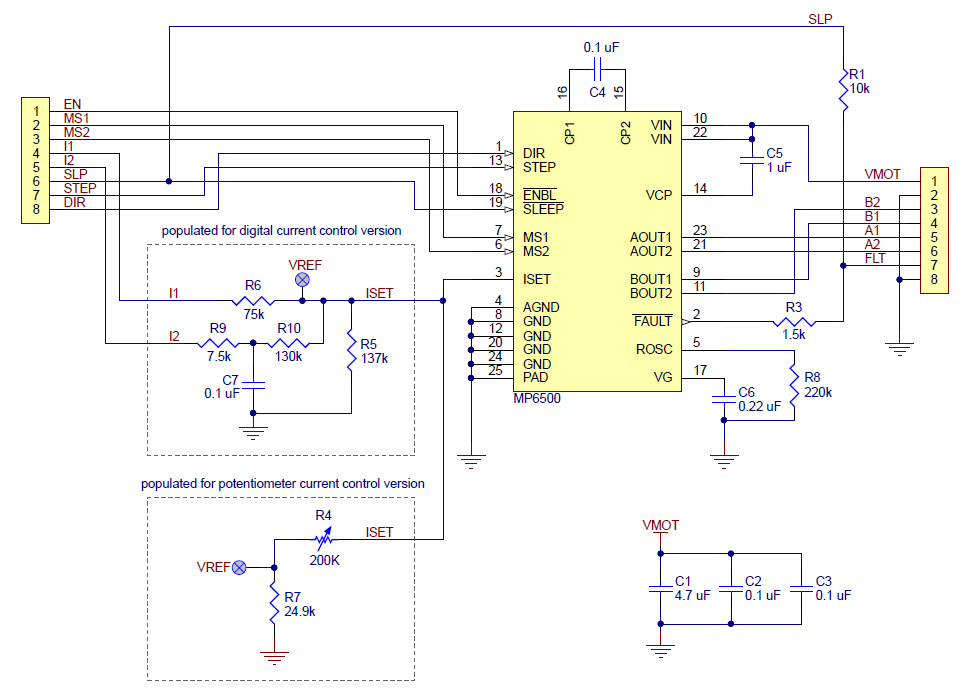
Um einen bipolaren Schrittmotor zu steuern, schließen Sie das System wie in der folgenden Abbildung gezeigt an. Wenn Sie einen unipolaren Motor ansteuern, lesen Sie bitte das Handbuch . Ist die Nennspannung des Motors kleiner als die erforderliche Reglerversorgung (4,5 V), muss die Stromgrenze digital eingestellt werden .

Die Abbildung zeigt den Mindestanschluss des Controllers. Ein Widerstand von +/- 100 µF sollte zwischen dem Motorstromanschluss und Masse platziert werden
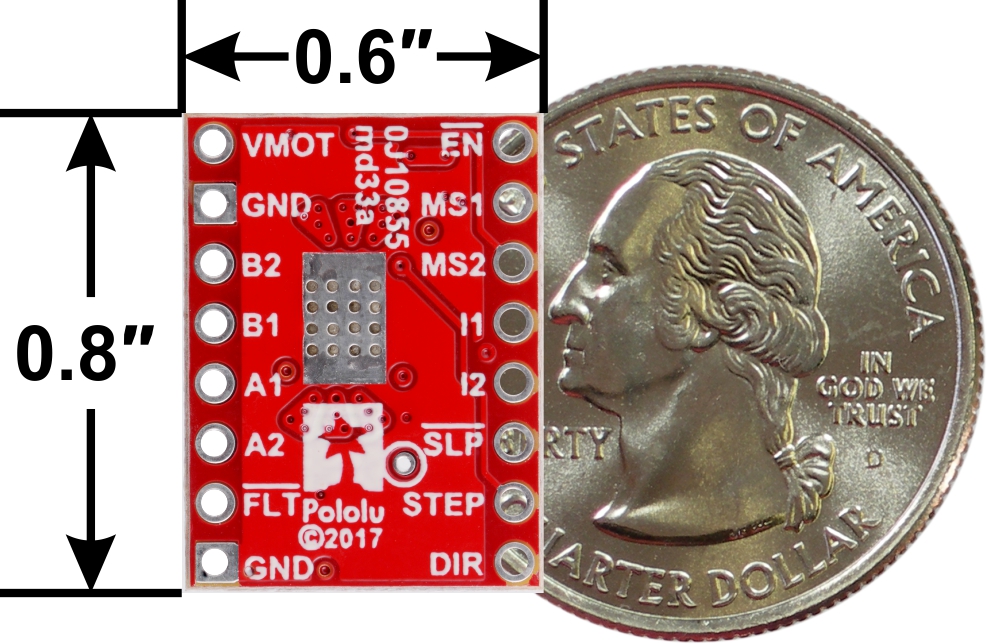
Zur Versorgung des Logikteils des Moduls wird eine Spannung im Bereich von 2,5 V bis 5 V benötigt, die auf den Sleep -Pin geführt werden sollte . Dem Pin wird die Motorversorgungsspannung im Bereich von 4,5 V bis 35 V zugeführt VMOT . Das System kann Motoren mit einer Nennspannung kleiner als die erforderlichen 4,5 V ansteuern. Dazu sollte die maximale Stromaufnahme so begrenzt werden, dass der zulässige Motorstrom nicht überschritten wird. Beispiel: Bei einem Motor mit einem Widerstand von 5 Ω pro Spule und einer Stromaufnahme von 1 A beträgt die Nennversorgungsspannung 5 V. Bei einer Versorgung mit 12 V sollte der Strom so begrenzt werden, dass er 1 A nicht überschreitet.
Warnung! Das Anschließen und Trennen des Motors bei eingeschalteter Steuerung kann das System beschädigen. |
Die Schrittweite wird durch die Eingänge MS1 , MS2 gewählt. Mögliche Einstellungen sind in der folgenden Tabelle aufgeführt. Die Eingänge MS1 und MS2 haben einen internen Pull-Down-Widerstand (500 kΩ ).
| MS1 | MS2 | Auflösung |
| niedrig | niedrig | Voller Schritt |
| hoch | niedrig | 1/2 Schritt |
| niedrig | hoch | 1/4 Schritt |
| hoch | hoch | 1/8 Schritt |
Ein an den STEP-Pin gegebener Impuls bewirkt einen Schritt des Motors in die gewählte Richtung, indem der DIR-Pin den entsprechenden logischen Zustand erhält. Wenn sich der Motor nur in eine Richtung drehen soll, kann der DIR-Stift getrennt bleiben.
Das System verfügt über zwei verschiedene Eingänge zur Steuerung der Stromversorgung: SLEEP und ENBL, deren Beschreibung in der Dokumentation enthalten ist. Beachten Sie, dass der Treiber diese beiden Pins durch die internen 500-kΩ-Widerstände zieht. Standardmäßig verhindert der SLEEP-Zustand den Betrieb des Motors, er muss auf hoch eingestellt sein (er kann direkt an die Logikstromversorgung von 2,5 bis 5 V angeschlossen oder durch Anschluss an den digitalen Ausgang der MCU gesteuert werden). Der Standard-ENBL-Zustand ist auf dem Treiber, er kann getrennt werden.
Der FAULT-Ausgang wird ausgeschaltet, wenn die F- und H-Brücken aufgrund von Überstrom, Überspannung, thermischer Abschaltung oder Unterspannungsschutz ausgeschaltet werden. Er wird über einen 10kΩ -Widerstand mit dem SLEEP-Pin verbunden, der ähnlich wie der FAULT funktioniert. Wenn SLEEP hoch ist, ist keine FAULT-Verbindung erforderlich.
Warnung! Durch das Verbinden von SLEEP und FAULT und das Auftreten eines Fehlers kann die Spannung am SLEEP-Pin unter 2,1 V fallen, wenn sie nicht ausreichend verstärkt wird. Es wird empfohlen, einen Widerstand von min. 4,7 kΩ mit diesem Kabel oder verbinden Sie SLEEP direkt mit VCC. |
Um hohe Drehzahlen zu erreichen, muss der Motor in der Regel höher bestromt werden, als dies ohne Strombegrenzung möglich wäre. Beispielsweise kann ein Schrittmotor bei einem Spulenwiderstand von 5 Ω einen maximalen Strom von 1 A haben, was für den Motor eine maximale Spannung von 5 V bedeuten würde.Die Verwendung dieses Motors bei 9 V würde höhere Geschwindigkeiten ermöglichen, aber der Strom muss auf weniger als 1 A begrenzt werden, um Beschädigungen zu vermeiden.
Die Steuerung verwendet die Ausgänge I1 und I2, um die Stromgrenze einzustellen. Wenn sowohl I1 als auch I2 getrennt sind, beträgt die Strombegrenzung standardmäßig 0,5 A.
| Ich1 | Ich2 | Derzeitige Begrenzung |
| AUS | AUS | 0,5A. |
| niedrig | AUS | 1 A. |
| AUS | niedrig | 1,5 Ampere |
| niedrig | niedrig | 2 A. |
Die Platine ist so ausgelegt, dass sie bei einer Stromaufnahme von ca. 1,8 A pro Spule Wärme abführen kann. Ist der Strom deutlich höher, sollte ein externer Kühlkörper verwendet werden, der mit Wärmeleitkleber befestigt werden kann.
Das System enthält die notwendigen passiven Komponenten für den korrekten Betrieb des Controllers . Das Anschlussschema ist in den folgenden Abbildungen dargestellt.
Nützliche Links |
| Stromspannung aus | 4,5 V. |
| Stromspannung Nieder | 35,0 V |
| Aktuelle Effizienz | 2 A. |
| Anzahl der Kanäle | 1 |
| Niebezpieczne | Komponente |
| PAKETBREITE | 7.5 cm |
| PAKETHÖHE | 1.2 cm |
| PAKETTIEFE | 9 cm |
| PAKETGEWICHT | 0.004 kg |
Seien Sie der Erste, der eine Frage zu diesem Produkt stellt!
Produktinformation
Das Produkt ist eine Komponente, die für die weitere Montage/den Prototypenbau bestimmt ist. Es stellt kein eigenständiges fertiges Produkt im Sinne der Vorschriften über die Produktsicherheit dar.
Dane GPSR
Herkunftsland: der Vereinigten Staaten
Hersteller-Kontaktdaten: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU-Vermarkter-Kontaktdaten: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin






