Creality Soleyin Ultra PLA Filament 1,75 mm 1 kg - Erdbeermilch
Index: CRL-28301
- Neu
- Kostenloser Versand
Creality Soleyin Ultra PLA Filament 1,75 mm 1 kg - Erdbeermilch


Raspberry Pi 4 Modell B, Dualband-WLAN, Bluetooth, 3 GB RAM, 1,8 GHz

Elegoo Filamentpaket mit Spulen - Gothic Pack PLA - 4 Stück.

Creality Soleyin Basic PETG-Filament 1,75 mm 1 kg – Gletschergrau

Creality Soleyin Ultra PLA-Filament 1,75 mm 1 kg – Hagebutte


EXTENSION CORD FOR ROTARY MODULE (1.5M)



Elektroantrieb LA50 1500N 100mm/s 12V - 30cm Hub

90° Schlitzsensor ITR9606 - Erweiterungsmodule Unit für M5Stack


Die Konstrukteure von Amateurrobotern sind sehr daran interessiert, das Arsenal an Elementen und Materialien zu nutzen, die ursprünglich für Modellbauer gedacht waren. Kein Wunder – die Anforderungen kleiner Roboter in Bezug auf Gewichts- und Größenbeschränkungen sowie die erzielten Kräfte und Drehmomente lassen Automatisierungs-Enthusiasten erfolgreich mit gängigen Servos arbeiten. Für sie haben wir universelle Servohalter bereitgestellt, die die Montage Ihrer eigenen Strukturen erheblich erleichtern.

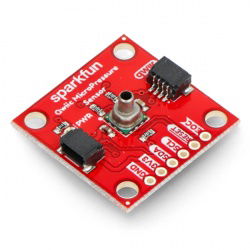
Halter für Micro Pan / Tilt Servos - SparkFun ROB-10335
Metallgriff, mit dem Sie eine von einem Servo gesteuerte Plattform erstellen können. Mit dem Bausatz zum Selbstbau bauen Sie zum Beispiel eine drehbare Kamerahalterung zur...
Halterung für Standardservos - Pololu 3435
Die Kunststoffhalterung für Standard- Servos gewährleistet eine komfortable Befestigung des Servos auf einer ebenen Fläche. Schwarze Halterung.
Micro Gripper KIT - ein Greifer mit einem Mikroservo - Pololu 3551
Ein Set zum Bau eines Minigreifers mit einem maximalen Abstand von 32 mm . Das Kit enthält auch ein speziell modifiziertes Mikroservo mit einem zusätzlichen Kabel, das...Auch prüfen
Die in unserem Angebot erhältlichen Servohalterungen ermöglichen den Bau hochwertiger Mechanismen, mit denen Sie (in zwei Achsen) die Position verschiedener Elemente steuern können, z.B. Kameras, Entfernungsmesser oder andere Sensoren sowie Effektoren. Diese Konstruktionsart – allgemein bekannt als Pan/Tilt – erzeugt eigentlich die sog serielle kinematische Kette. Das bedeutet, dass jedes nachfolgende Segment – das „Kettenglied“ – das vorherige Element als Basis verwendet. Somit setzt sich die resultierende Bewegung des letzten Gliedes und des mit ihm verbundenen Elements aus den Bewegungen der Antriebe zusammen, die zwischen allen verbleibenden Gliedern angeordnet sind. Die einfachste Version eines solchen Mechanismus kann nur zwei Antriebe verwenden - ein Servo ist für die Drehung des Ganzen in der vertikalen Achse (rechts-links) und der andere für die Drehung in der horizontalen Achse (oben-unten) verantwortlich. So funktionieren zum Beispiel Dagu-Servogriffe, angepasst an die Arbeit mit Standard- und Mikroservos.
Eine der interessantesten und effektivsten Möglichkeiten, diese Art von Mechanismus zu verwenden, ist ein Roboter, der Gesichter mit einer Kamera verfolgt. Sie können einen Raspberry Pi-Minicomputer mit einem Kameramodul und einem Servosteuerhut und - natürlich - geeigneten Servogriffen verwenden. In einfacheren Anwendungen kann die Kamera einfach ein sich bewegendes Objekt verfolgen oder beispielsweise nur Objekte einer bestimmten Farbe. Das Schwenk-/Neigesystem kann auch verwendet werden, um ein eigenes System zur Fernüberwachung einer Wohnung, eines Raums, eines Studios oder beispielsweise einer Vorschau eines 3D-Druckers aufzubauen. Die Liste möglicher Anwendungen solcher Mechanismen ist jedoch nicht erschöpfend für Bildverarbeitungsanwendungen. Eine weitere interessante Anwendung ist der Bau eines einfachen Roboterarms, der in einem Greifer endet, der ebenfalls von Servos angetrieben wird (z. B. Pololu Micro Gripper Kit). Ein solcher Arm würde Aluminium-Servohalterungen als strukturelle Komponenten verwenden.
Nichts hindert Sie daran, die beiden Schwenk-/Neigemechanismen zu einer größeren Kette zu kombinieren - denken Sie nur daran, das Gewicht des Ganzen so niedrig zu halten, wie die niedrigsten Servos (dh die Antriebe, die am nächsten an der Basis des Roboters arbeiten) belastet sind das Gesamtgewicht der weiteren Arme (und möglicher Effektoren). Für anspruchsvollere Konstruktionen, bei denen der Vorstellungskraft des Konstrukteurs und den Drehmomenten der verwendeten Servos nur Grenzen gesetzt sind, eignen sich verschiedene Arten von mehr oder weniger komplexen Servohalterungen, z.B. FK-LS-001 oder FK-MB-001.