

















































































































































































- Neu
- Kostenloser Versand

Shelly Power Strip 4 Gen4 - Intelligente Steckdosenleiste - weiß

Shelly Power Strip 4 Gen4 - Intelligente Steckdosenleiste - schwarz

BleBox inputSensorQ - 4-Kanal-WiFi-Eingangsmodul, 5-24 V DC

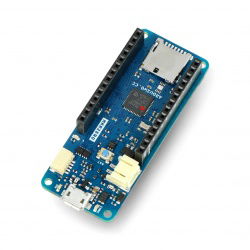
Arduino MKR Zero ABX00012 - SAMD21 - mit Anschlüssen
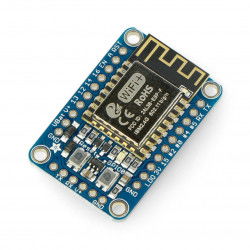
Huzzah ESP8266 - WiFi-GPIO-Modul, ADC, PCB-Antenne - Adafruit 2471






USB-UART FTDI 3,3 V miniUSB-Konverter - SparkFun DEV-09873


Produkte, deren Verkauf abgeschlossen ist.
Auch prüfen







