





















































































































































































































































































- Neu
- Kostenloser Versand

Paket - 3D-Drucker - Creality K2 Plus Combo + 6 PLA-Filamente


Zamel Supla ROW-07 - 7x 230V WiFi Relais - Android/iOS Anwendung

JT-JDS2960 60MHz Funktionsgenerator - 2 Kanäle


Sicherheitsknopf für 3D-Drucker Snapmaker 2.0

Elektroantrieb Super Power Jack 2000N 7,5mm/s 12V - Hub 44cm

Servo PowerHD WH-30KG - standardmäßig wasserdicht

Elektroantrieb LA10 150N 40mm/s 12V - 30cm Hub



PowerHD HD-1900MG micro - analoger Servo
Motortreiber sind unverzichtbar, wenn es darum geht, Motoren gezielt zu steuern und zuverlässig in elektronische Systeme zu integrieren. Diese Module sorgen für präzise Bewegungsabläufe, schützen vor Überlastung und ermöglichen die Ansteuerung über PWM- und Richtungssignale. BOTLAND bietet eine breite Auswahl an Treibern für verschiedene Anwendungen – von Robotik bis hin zu 3D-Druck – passend für Einsteiger, Entwickler und Profis.
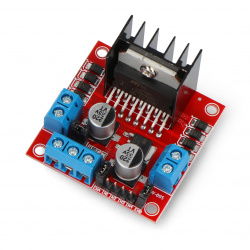
L298N - Zweikanal-Motortreiber - Modul 12V / 2A
Modul mit einem zweikanaligen Treiber für Gleichstrommotoren L298. Es wird mit einer Spannung von bis zu 12 V versorgt. Der maximale Kanalstrom beträgt 2 A. Das System verfügt...
Cytron MD13S - Einkanaltreiber für 30V / 13A Motoren
Einkanal- DC -Motortreiber. Dauerstrom pro Kanal 13 A (kurzzeitig 30 A ). Die Versorgungsspannung beträgt 5 V bis 30 V. Die Platine hat einen Grove-Anschluss.
TB6612FNG - Zweikanaltreiber für 13,5 V / 1 A-Motoren - Pololu 713
Pololu-Modul mit einem zweikanaligen Treiber für Gleichstrommotoren. Es wird mit der Spannung von 4,5 V bis 13,5 V versorgt. Der Dauerstrom pro Kanal beträgt 1 A, bei...
Einfacher DC 28V / 3A Motortreiber - Modul mit einem Knopf
Extrem einfach zu bedienende, einkanalige DC-Motorsteuerung mit Drehzahlregler. Das Gerät arbeitet auf Basis des PWM-Signals. Die Versorgungsspannung beträgt 8 V bis 36 V, der...
Cytron MD20A - Einkanaltreiber für 30V / 20A Motoren
Einkanaliger Treiber für DC-Motoren basierend auf MOSFET-Transistoren. Damit können Sie die Motordrehzahl über den PWM-Kanal steuern. Dauerstrom pro Kanal beträgt 20 A...
Cytron MD10C - Einkanaltreiber für 30V / 13A Motoren
Einkanal- DC-Motortreiber. Dauerstrom pro Kanal 13 A (kurzzeitig 30 A). Versorgungsspannung von 5 V bis 30 V.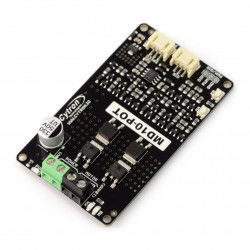
Cytron MD10-POT - DC 30V / 10A Motortreiber + Schalter + Potentiometer
Einkanal-DC-Motortreiber, mit dem Sie den Motor mit einem Schalter und einem Potentiometer steuern können, ohne dass ein Mikrocontroller und Programmierung erforderlich sind....
Cytron MDD3A - Zweikanaltreiber für DC 16V / 3A Motoren
Der Cytron MDD3A Motortreiber kann 2 Gleichstrommotoren oder 1 Schrittmotor steuern. Der Dauerstrom pro Kanal beträgt 3 A (kurzzeitig 5 A) . Die Versorgungsspannung beträgt...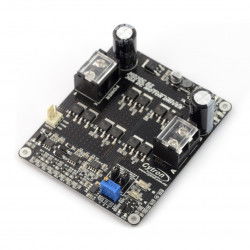
Cytron MD30C - Einkanaltreiber für 30V / 30A-Motoren
Einkanal- DC-Motortreiber. Dauerstrom pro Kanal 30 A (kurzzeitig 80 A). Versorgungsspannung von 5 V bis 30 V.
Cytron MDD10A - Zweikanaltreiber für DC 30V / 10A Motoren
Zweikanaliger Treiber für DC-Motoren. Der Dauerstrom pro Kanal beträgt 10 A (kurzzeitig 30 A) . Die Versorgungsspannung beträgt 5 V bis 30 V. Der Controller arbeitet mit...
DRV8835 - Zweikanal-Motortreiber 11 V / 1,2 A - Schild für Arduino - Pololu 2511
Ein Modul mit einem zweikanaligen DRV8835-System, das mit Spannungen von 2 V bis 11 V und einem Strom von bis zu 1,2 A pro Kanal (max. 1,5 A) arbeitet. Das System kann direkt...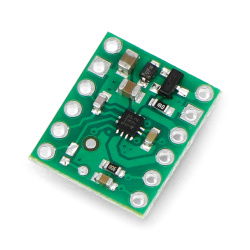
MP6550 - 22V/1.7A Einkanal-Motorsteuerung - Pololu 4733
Controller auf der Basis des MP6550-Chips zur Steuerung der Geschwindigkeit und Richtung eines Gleichstrommotors. Er arbeitet mit Motoren, die mit 1,8 V bis 22 V betrieben...
DRV8838 - Einkanal-Motortreiber 11 V / 1,7 A - Pololu 2990
Einkanal-DC-Motortreiber. Dauerstrom pro Kanal 1,7 A (kurzzeitig bis 1,8 A). Versorgungsspannung bis 11 V.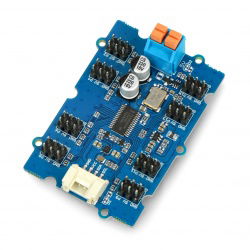
Grove – PCA9685 – 16-Kanal-12-Bit-PWM-I2C-Servotreiber
16-Kanal-PWM-Generator, nützlich, wenn die Mikrocontroller-Ausgänge fehlen. Es ermöglicht unter anderem: das Steuern von Servos, das Anpassen der Geschwindigkeit von Motoren...
N-Kanal-MOSFET-Treiber – für Motoren, Elektromagnete, LEDs – STEMMA JST PH 2 mm – Adafruit 5648
N-Kanal -MOSFET-Treiber (auch Transistor genannt) von Adafruit mit dem AO3406- Chip. Das Modul kann mit einer Spannung von 3 V bis 30 V versorgt und durch ein Signal mit...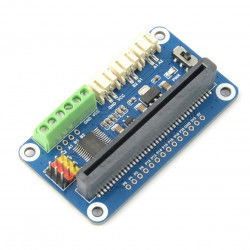
Treiber für 2 Motoren und 3 I2C-Servos für BBC Micro: Bit - Waveshare 15220
Erweiterungsplatine für Micro: Bit-Modul. Es ermöglicht Ihnen, 2 DC-Motoren und 3 Servos über die I2C-Schnittstelle mit 12-Bit-Auflösung für jeden Kanal zu steuern . Es...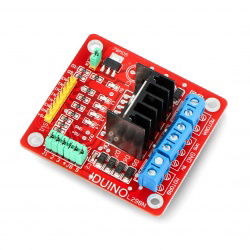
Zweikanal-Treiber für L298N-Motoren - Modul WB291111 - Iduino ST1112
Modul mit einem zweikanaligen Treiber von DC-Motoren L298N. Es wird mit einer Spannung von 5 V bis 46 V versorgt. Der maximale Kanalstrom beträgt 2 A. Das System verfügt über...
TB67H453FTG QFN - 44V/1.1A Einkanal-Bürstenmotortreiber - Pololu 4972
Der TB67H453FTG ist Toshibas kompakter Bürstenmotortreiber im QFN-Gehäuse , der die Steuerung eines bidirektionalen Gleichstrommotors mit 4,5 V bis 44 V ermöglicht. Er...
Cytron Maker Drive MX1508 - Zweikanal-Motortreiber mit 9,5 V / 1 A
Einfach zu bedienender, zweikanaliger DC-Motortreiber, ausgestattet mit einer H-Brücke Dauerstrom pro Kanal beträgt 1 A (kurzzeitig 1,5 A). Stromversorgung von 2,5 V bis 9,5 V....
DRV8833 - Zweikanal-Motortreiber 10,8 V / 1,2 A - Adafruit 3297
Zweikanal-DC-Motortreiber. Dauerstrom pro Kanal 1,2 A (kurzzeitig bis 2 A). Die Versorgungsspannung beträgt 2,7 V bis 10,8 V.
DRV8876 QFN - Einkanal-Treiber 37 V / 1,1 A - Pololu 4037
DC-Motortreiber hergestellt von Pololu. Einkanalig , ausgestattet mit dem QFN-System DRV8876, wird es mit einer Spannung von 4,5 V bis 37 V versorgt. Der Dauerstrom pro...
DFRobot - Vierkanal-5,5-V-/1,5-A-Motortreiber für BBC-Mikro: Bit
Schild für Mikro: Bit , mit dem Sie vier Gleichstrommotoren , zwei Schrittmotoren und acht Servos (5,5 V / 1,5 A) steuern können. Außerdem verfügt das Modul über 9 Pins...
Zweikanal-DC-Motortreiber, I2C-Schnittstelle – HAT für Raspberry Pi – Waveshare 15364
Shield HAT für Raspberry Pi 3/2 / B + / Zero / Zero W , mit dem Sie zwei Gleichstrommotoren über die I2C-Schnittstelle steuern können. Es kann zwei Gleichstrommotoren...Motortreiber-Module bilden die Schnittstelle zwischen Mikrocontrollern und elektrischen Antrieben – sie ermöglichen eine präzise Steuerung von Geschwindigkeit und Drehrichtung in Anwendungen, in denen herkömmliche GPIO-Signale nicht ausreichen. Bei BOTLAND finden Sie eine Vielzahl solcher Module, die unterschiedliche Anforderungen an Spannung, Stromstärke und die Anzahl der Steuerkanäle abdecken – darunter auch Lösungen für kompakte Geräte und mobile Plattformen.
Vor allem in der Motorsteuerung der Robotik spielen diese Module eine zentrale Rolle. Sie sorgen nicht nur für die korrekte Ansteuerung der Motoren, sondern auch für den Schutz der elektronischen Steuerungen durch galvanische Trennung oder integrierte Sicherheitsmechanismen. In Projekten, bei denen hohe Genauigkeit und kontrolliertes Verhalten der Antriebe gefragt sind – etwa in autonomen Robotern, CNC-Systemen oder DIY-Fahrzeugen – lässt sich auf eine durchdachte Motoransteuerung nicht verzichten.
Ein durchdachter Aufbau eines Steuerungssystems hängt stark von der Auswahl geeigneter Komponenten ab. Die Auswahl von Motortreibern basiert typischerweise auf Kriterien wie Versorgungsspannung, maximalem Motorstrom, Steuersignaltypen sowie der Art der anzuschließenden Motoren (DC, Schrittmotor, bürstenlos etc.). Ein klar definierter Anwendungsbereich erleichtert die Entscheidung.
Die sogenannte H-Brückenschaltung ist das Kernprinzip vieler H-Brücken-Motorcontroller. Diese Technik ermöglicht, Gleichstrommotoren in beide Richtungen anzutreiben – durch einfaches Umschalten der Polarität. In Motortreiber-Modulen ist diese Struktur häufig in kompakter Form auf einer Leiterplatte integriert, sodass der Benutzer lediglich Motor, Stromversorgung und Steuerlogik verbinden muss.
Technisch gesehen besteht eine H-Brücke aus vier elektronischen Schaltern (z. B. MOSFETs), die paarweise geschaltet werden, um den Stromfluss in die gewünschte Richtung zu lenken. Diese Konstruktion ermöglicht eine bidirektionale Steuerung, wobei moderne Module oft zusätzlich Funktionen wie Strombegrenzung, Fehlererkennung oder Temperaturüberwachung enthalten.
Solche Treiberlösungen sind besonders im Bereich der Automatisierung gefragt, da sie ohne externe Relais oder mechanische Umschalter auskommen. Die Integration in Embedded-Systeme ist dabei einfach, da sie häufig standardisierte Steuerprotokolle wie I²C, UART oder PWM unterstützen. So bleibt der Hardwareaufwand überschaubar und die Ansteuerung flexibel.
Ein funktionierendes Antriebssystem beginnt mit der richtigen Komponentenauswahl. Treiber für DC- und Schrittmotoren unterscheiden sich je nach Motortyp deutlich in ihrem Funktionsprinzip und ihrer Komplexität. DC-Motoren benötigen meist einfache H-Brücken mit PWM-Funktion, während Schrittmotoren eine Phasenansteuerung mit präziser Taktsteuerung verlangen – häufig über spezialisierte Chips mit Mikroschrittfähigkeit.
Dabei gilt: Je höher der Motorstrom, desto robuster muss das Treibermodul sein. Die Angaben zu maximalem Dauerstrom und Versorgungsspannung sind entscheidend für die Langlebigkeit und Funktionssicherheit. Im Bereich der Treiber für 3D-Drucker-Motoren ist zudem die Geräuschentwicklung relevant – leise Mikroschritt-Controller mit hoher Effizienz sind hier die bevorzugte Wahl.
Ein weiteres Auswahlkriterium betrifft das Zielsystem: Manche Module sind direkt für den Einsatz mit Arduino oder Raspberry Pi vorgesehen, inklusive passender Anschlüsse und Softwarebibliotheken. Bei BOTLAND erhalten Sie Produkte mit verschiedenen Leistungsstufen, Schnittstellen und Formfaktoren – geeignet für Prototypenbau ebenso wie für Seriengeräte.
Die Kombination aus Pulsweitenmodulation und Richtungssignal ist ein bewährter Standard in der Antriebstechnik. PWM- und Richtungssteuerung ermöglichen, Motoren exakt zu regeln, ohne aufwändige Regelalgorithmen direkt im Mikrocontroller zu implementieren. Ein PWM-Signal steuert die Drehzahl, während ein separates Signal die Drehrichtung definiert – die eigentliche Arbeit übernimmt das Motortreibermodul.
In vielen Projekten mit Microcontrollern wie Arduino oder STM32 sind Pins für PWM-Signale bereits vorgesehen, sodass sich Treibermodule mit dieser Logik schnell integrieren lassen. Wichtig dabei ist die Pegelkompatibilität: Die vom Controller ausgegebenen logischen Signale für Motortreiber müssen den Anforderungen des Moduls entsprechen, z. B. 3,3 V oder 5 V TTL.
Ein Vorteil dieser Steuerungsart liegt in der einfachen Implementierung auch bei mehreren Motoren. Die Leistungselektronik bleibt ausgelagert, die Steuerlogik zentralisiert. In industriellen Anwendungen sowie bei mobilen Robotern ist dieses Prinzip weit verbreitet, da es zuverlässige Kontrolle bei minimaler CPU-Last ermöglicht.
Ein sicherer Betrieb hängt nicht nur von der korrekten Ansteuerung, sondern auch vom Schutz der Komponenten ab. Ein zuverlässiger Überlastschutz für Motortreiber verhindert Schäden durch Kurzschluss, Überstrom oder thermische Belastung – ein Aspekt, der besonders bei leistungsstarken Motoren mit schwankenden Lasten unverzichtbar ist.
Viele moderne Module verfügen über integrierte Schutzfunktionen wie Übertemperaturabschaltung, Strombegrenzung oder Fehlerausgangssignale. Auch externe Sicherungen oder Kühlkörper können eingesetzt werden, um die Lebensdauer zu verlängern. Beim Testen von Motortreibermodulen sollten diese Schutzfunktionen bewusst provoziert werden, um ihre Wirksamkeit zu prüfen – insbesondere bei Einsatz im Dauerbetrieb oder in rauer Umgebung.
In unserem Sortiment bei BOTLAND finden Sie eine breite Auswahl an Motortreibern mit integriertem Schutzmechanismus – geeignet für mobile Roboter, 3D-Drucker oder industrielle Steuerungen. Dank unseres Erfahrungshintergrunds und der positiven Bewertungen von über 100.000 Kunden bieten wir Ihnen geprüfte Qualität für jede Anwendung.





