








































































































































































































































































































Filament kit - Rosa3D Refill PLA-CF Matt Home Decor 1.75mm 4x 1kg
Index: ROS-27713
- Neu
- Reduziert
- Artikelbündel
- Kostenloser Versand
- Sonderangebot
Filament kit - Rosa3D Refill PLA-CF Matt Home Decor 1.75mm 4x 1kg





Polymaker PolyLite Leuchtendes PLA Filament 1.75mm 1kg - Orange

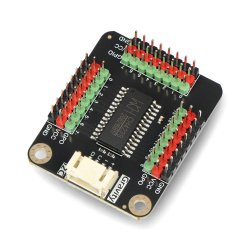
M5StickC 8-Kanal-Servotreiber V1.1 - Hutabdeckung - M5Stack U076-B



Fiberlogy Easy PLA 2,85mm 0,85kg Filament - Weiß

Produkte, deren Verkauf abgeschlossen ist.
Auch prüfen







