























































































































































































Produkte, deren Verkauf abgeschlossen ist.

- Neu
- Kostenloser Versand

- Neu
- Kostenloser Versand

Shelly Power Strip 4 Gen4 - Intelligente Steckdosenleiste - weiß
Index: INN-27510
- Neu
- Kostenloser Versand

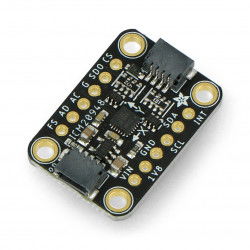
USB-Nano-Adapter - Bluetooth 5.4 LE Audio LC3 - Edimax BT-8530
Index: EDI-27362
- Neu
- Kostenloser Versand

- Neu
- Kostenloser Versand
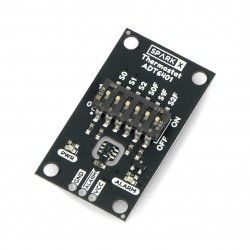
Auto-Digital-Thermostat – ADT6401 – SparkFun SPX-16772
Index: SPF-19307
- Ausverkauf
- Kostenloser Versand
- Sonderangebot
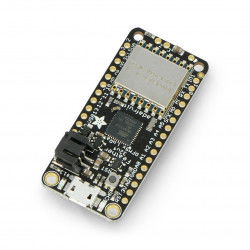
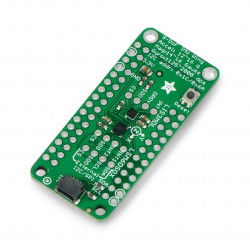
Funksender Feather 32u4 RFM95 LoRa Radio - 868 MHz - Adafruit 3078
Index: ADA-13280
- Reduziert
- Kostenloser Versand
- Sonderangebot

- Reduziert
- Kostenloser Versand
- Sonderangebot
- Ausverkauf
- Kostenloser Versand
- Sonderangebot

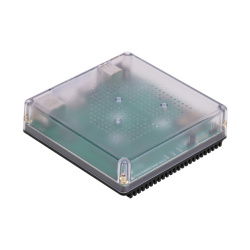
Ständer für den Sharp Digitalsensor - Pololu 1133
Index: PLL-00034
- Ausverkauf
- Kostenloser Versand
- Sonderangebot

- Ausverkauf
- Kostenloser Versand
- Sonderangebot

- Reduziert
- Kostenloser Versand
- Sonderangebot

- Reduziert
- Kostenloser Versand
- Sonderangebot

Print-Me E-HT PLA Filament 1,75mm 0,85kg - Polar Weiß
Index: PRI-25054
- Reduziert
- Kostenloser Versand
- Sonderangebot

Grove Base Kit für Raspberry Pi 4B/3B+ - Bausatz für Einsteiger
Index: SEE-14420
- Reduziert
- Kostenloser Versand
- Sonderangebot





Auch prüfen