






































































































































































































BleBox twinMagnet – Magnetzubehör für den openSensor – Anthrazit
Index: BOX-27690
- Neu
- Kostenloser Versand
BleBox twinMagnet – Magnetzubehör für den openSensor – Anthrazit

BleBox openSensor – WLAN-Tür- und Fensteröffnungssensor – Anthrazit



Sonoff THR316 TH Origin – WLAN/Matter-Relais mit Temperatur- und...
Arduino Modulino Pixels - 8 RGB LED Modul - Qwiic - ABX00109

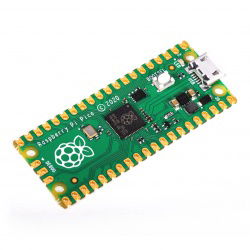
Raspberry Pi Pico - RP2040 ARM-Cortex M0 +

Laserkopfmodul für Artisan Snapmaker - 40W

RFID-Glaskapsel - 125 kHz - SparkFun SEN-09416
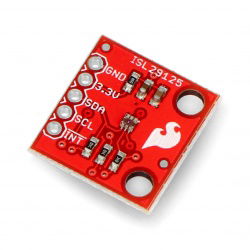
ISL29125 RGB I2C Lichtintensitätssensor – SparkFun SEN-12829

Produkte, deren Verkauf abgeschlossen ist.
Auch prüfen







