












































































































































































































































































































Produkte, deren Verkauf abgeschlossen ist.

Filament kit - Rosa3D Refill PLA-CF Matt Home Decor 1.75mm 4x 1kg
Index: ROS-27713
- Neu
- Reduziert
- Artikelbündel
- Kostenloser Versand
- Sonderangebot

Kit - Creality Hi Combo 3D Drucker + 4x Creality Hyper PLA Filament
Index: CRL-27622
- Neu
- Reduziert
- Artikelbündel
- Kostenloser Versand
- Sonderangebot

- Neu
- Kostenloser Versand

- Neu
- Kostenloser Versand

Buchsenleiste 1x10 Raster 2mm SMD - XBee - SparkFun PRT-10030
Index: SPF-03396
- Ausverkauf
- Kostenloser Versand
- Sonderangebot

- Reduziert
- Kostenloser Versand
- Sonderangebot

Grove Base Kit für Raspberry Pi 4B/3B+ - Bausatz für Einsteiger
Index: SEE-14420
- Reduziert
- Kostenloser Versand
- Sonderangebot

Polymaker Filament Panchroma Starlight PLA 1.75mm 1kg - Aurora
Index: PLM-25204
- Reduziert
- Kostenloser Versand
- Sonderangebot
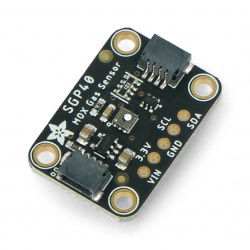
Luftreinheitssensor SGP40 - VOC - STEMMA QT / Qwiic - Adafruit 4829
Index: ADA-18998
- Reduziert
- Kostenloser Versand
- Sonderangebot
- Ausverkauf
- Kostenloser Versand
- Sonderangebot

Konkaver Arcade-Knopf 3,5 cm – blau – SparkFun COM-09337
Index: SPF-10079
- Ausverkauf
- Kostenloser Versand
- Sonderangebot

- Reduziert
- Kostenloser Versand
- Sonderangebot

- Ausverkauf
- Kostenloser Versand
- Sonderangebot

Polymaker PolySmooth PVB-Filament 1,75 mm, 0,75 kg - Schwarz
Index: PLM-22743
- Ausverkauf
- Kostenloser Versand
- Sonderangebot





Auch prüfen